Modding XBox Controller
- Thread starter D396
- Start date
you know whats weird though? Before this thread i had my controllers serial port mis-wired.
The serial in and out were backwards, but if i stuck the serial cable halfway in, started the program and then stuck the serial all the way in, it would download a program to the 14m , and it would work. isn't that odd?
The serial in and out were backwards, but if i stuck the serial cable halfway in, started the program and then stuck the serial all the way in, it would download a program to the 14m , and it would work. isn't that odd?
if u ever wanted to go smd with those dorkbots heres the place to get ur smd picaxes
http://microcontrollerwarehouse.com/category.php?id_category=11
http://microcontrollerwarehouse.com/category.php?id_category=11
AFAIK,what is godot
D396 and aduy
shared a rally of 211.
Does this beat Wimbledon?
And Godot?
Go on, have a search.
")
e
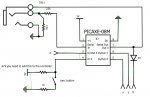
if you want to do a jitter mod im pretty sure it can only be done on a cg type controller. you might be able to do it on a matrix, but it will require some researching, and will definitely be more difficult to do. heres my schematic for my controller if i did it with an 08m ill make a code too.
Attachments
-
 72.9 KB Views: 14
72.9 KB Views: 14
It's OK I don't think I am going to do a jitter mod. I have already modded 6 remotes for my friends. My PCB came today Here is a picture.
Attachments
-
 261.5 KB Views: 16
261.5 KB Views: 16 -
 371.8 KB Views: 13
371.8 KB Views: 13
Get your Picaxe runnin'easy rider
out along the highway,
looking for a program.
to control my new Xbox. HeY!
e
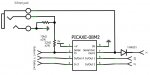
its been a little while since ive been on this forum ~3 months or so, but im working on a controller mod using the new 08m2 i ordered the surface mount versions from rev ed, and i ordered some soic 8 to dip 8 pcbs, because all i need for this project is the
stereo jack
10k resistor
22k resistor
diode
SOIC to dip pcb
08m2
11 wires
solder
ill make the schematic, and i will post what i have so far for the program.
the reason im posting is because i need some help with the code.
stereo jack
10k resistor
22k resistor
diode
SOIC to dip pcb
08m2
11 wires
solder
ill make the schematic, and i will post what i have so far for the program.
the reason im posting is because i need some help with the code.
my schematic is attached, and here is my code so far, i will update it as i go, if you have any suggestions it would be greatly appreciated
Code:
debug
setfreq m32
main:
if pinC.5 = 1 then goto CODMW2
if pinC.4 = 1 then goto CODBO
goto main
UNACTIVE:
let dirsc = %000000
if pinC.5 = 1 then goto interupt1
goto UNACTIVE
Interupt1:
if pinC.5 = 0 then goto Rapid_Fire_Wait
if pinC.4 = 1 then goto Adjust
goto Interupt1
Rapid_Fire_Wait:
readadc C.1,b1
if b1 >25 then goto Rapid_Fire_Engaged
if pinC.5 = 1 then goto interupt2
goto Rapid_Fire_Wait
Rapid_Fire_Engaged:
High C.1
pause b2
Low C.1
pause b2
readadc C.1,b1
if b1 >25 then goto Rapid_Fire_Engaged
goto Rapid_Fire_Wait
Interupt2:
if pinC.5 = 0 then goto Dual_Rapid_Fire_Wait
if pinC.4 = 1 then goto Adjust
goto Interupt2
Dual_Rapid_Fire_Wait:
readadc C.1,b1
if b1 >25 then goto Dual_Rapid_Fire_Engaged
if pinC.5 = 1 then goto interupt3
goto Dual_Rapid_Fire_Wait
Dual_Rapid_Fire_engaged:
High C.1
Low C.2
pause b2
Low C.1
High C.2
pause b2
readadc C.1,b1
if b1 >25 then goto Dual_Rapid_Fire_Engaged
goto Dual_Rapid_Fire_Wait
Interupt3:
if pinC.5 = 0 then goto Jitter_Wait
if pinC.4 = 1 then goto Adjust
goto Interupt3
Jitter_Wait:
readadc C.1,b1
if b1 >25 then goto Jitter_Engaged
if pinC.5 = 1 then goto interupt1
goto Jitter_wait
Jitter_engaged:
High C.1
pause b3
Low C.1
High C.0
pause b3
High C.4
pause b3
low c.4
pause b3
high c.4
pause b3
low c.4
pause b3
readadc C.1,b1
if b1 >25 then goto Jitter_Engaged
goto Jitter_Wait
Adjust:
goto interupt1
CODMW2:
b2 = 400 ; this value sets the rate of the Rapid_Fire
b3 = 100 ; this value sets the rate of the Jitter
goto UNACTIVE
CODBO:
b2 = 500 ; this value sets the rate of the Rapid_Fire
b3 = 100 ; this value sets the rate of the Jitter
goto UNACTIVEAttachments
-
 40.4 KB Views: 26
40.4 KB Views: 26
Last edited:
Hey aduy... long time no see. Like what you are doing with the mod. I've been gone so long I didn't even know they had 08M2 parts. That makes life easier from a package size perspective.
Couple tips on the code... I would add some pauses into your interupt and your time setting snippets (CODBO and CODMW2). I also noticed you are pulling your pin voltages in opposite directions for your dual rapid fire. I would check that as typically you should pull both triggers in one direction. You may also want to do a readadc on your left trigger as well during your dual fire so that either trigger can toggle your rapid fire on (i.e. readadc C.2,b2 ; if b2 >25 then goto Dual_Rapid_Fire_Engaged).
Just some thoughts. Let me know how the project turns out. We still have to hook up on Xbox Live... I will have to show you my anti rapid fire detection algorithm some time.
-Reggie
aka Rad Reg
aka admin@supermodz.com
http://www.supermodz.com
Couple tips on the code... I would add some pauses into your interupt and your time setting snippets (CODBO and CODMW2). I also noticed you are pulling your pin voltages in opposite directions for your dual rapid fire. I would check that as typically you should pull both triggers in one direction. You may also want to do a readadc on your left trigger as well during your dual fire so that either trigger can toggle your rapid fire on (i.e. readadc C.2,b2 ; if b2 >25 then goto Dual_Rapid_Fire_Engaged).
Just some thoughts. Let me know how the project turns out. We still have to hook up on Xbox Live... I will have to show you my anti rapid fire detection algorithm some time.
-Reggie
aka Rad Reg
aka admin@supermodz.com
http://www.supermodz.com
Last edited:
yes it has been a while. im not sure if that code is good or not, as i wrote it some time ago, and i haven't had time to play xbox for a few months because ive been at school. i got the emails about your website it looks great. and yes the pistols are supposed to alternate, it sounds like they are shooting twice as fast, and the reason i have two seperate modes is because you cant aim if pressing the left trigger toggles the dual rapidfire.