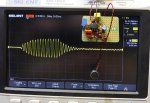
Hey, Alan! Thanks for the input! The 32ms of the burst is measured on the O'scope, so it is accurate at 16MHz. ")
I'll have to try your code, and see how it works. I would imagine that the 08M2 chip should still be more than powerful enough to process this... unless it lacks a timer, but I don't think that's the case. I don't need microsecond accuracy, after all. I'm only dealing with a maximum range of about 150ms echo to 390ms echo, and want to convert that into a percentage of water level. Sadly, right now, I just found out that I'm close to zero!
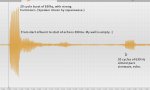
Minutes before posting this reply, I did a REAL WORLD TEST with a very crude speaker setup and my phone to record it. The ping and the echo are truly distinct.
NOTE: The 630 Hz echo is the SAME, regardless of the water level! I have several recordings of various water levels, and confirmed that with the FFT analysis of my audio editor.
Here's what's really cool! When I send 20 cycles of 630 Hz down... I get twenty cycles back! There is minimal "ringing", so... well, a picture is worth 1,000 words. The sounds are as crisp and clear as this audio editor's image implies! I hear the "PIP!" of the speaker, and the "pip" of the echo. It should be very easy to make a clean logic pulse from this echo, to stop the timer in the PICAXE.
I'll have to try your code, and see how it works. I would imagine that the 08M2 chip should still be more than powerful enough to process this... unless it lacks a timer, but I don't think that's the case. I don't need microsecond accuracy, after all.
I'm only dealing with a maximum range of about 150ms echo to 390ms echo, and want to convert that into a percentage of water level. Sadly, right now, I just found out that I'm close to zero! Minutes before posting this reply, I did a REAL WORLD TEST with a very crude speaker setup and my phone to record it. The ping and the echo are truly distinct.
NOTE: The 630 Hz echo is the SAME, regardless of the water level! I have several recordings of various water levels, and confirmed that with the FFT analysis of my audio editor.
Here's what's really cool! When I send 20 cycles of 630 Hz down... I get twenty cycles back!
There is minimal "ringing", so... well, a picture is worth 1,000 words. The sounds are as crisp and clear as this audio editor's image implies! I hear the "PIP!" of the speaker, and the "pip" of the echo. It should be very easy to make a clean logic pulse from this echo, to stop the timer in the PICAXE.Attachments
-
 118.4 KB Views: 11
118.4 KB Views: 11