hi,
i,ve been plodding along with this idea for to long, am trying to add serial touch input using 14m2 too a little bot am making
again using brass "drawing pins" .I do need a better touch sensor was thinking off using coper stripes rev ed sells 3mm coper stripes i was thinking off slightly overlay a strip till i made an inch square solder dap each strip then cut into a circle does anyone see a problem making a sensor this way.
.I do need a better touch sensor was thinking off using coper stripes rev ed sells 3mm coper stripes i was thinking off slightly overlay a strip till i made an inch square solder dap each strip then cut into a circle does anyone see a problem making a sensor this way.
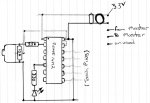
anyway the problem am having am using is after i calibrate the sensors they was'nt relaible reacting to my touch "hit and miss" to say but when i touch the download socket " which is in the center of the buttons please see pic" and the sensors they worked every time. I dont know why, but i thought i may roll with it as a feature again'st accendental touch or unwanted little fingers. i.ve had an off the wall idea of adding an 22uf cap on the serial out pin of download socket to ground. but because i not got the project on a breadboard i thought i ask here if adding the cap a good idea or not. so that what i observed and am going to look at some auto calibration routines.
" which is in the center of the buttons please see pic" and the sensors they worked every time. I dont know why, but i thought i may roll with it as a feature again'st accendental touch or unwanted little fingers. i.ve had an off the wall idea of adding an 22uf cap on the serial out pin of download socket to ground. but because i not got the project on a breadboard i thought i ask here if adding the cap a good idea or not. so that what i observed and am going to look at some auto calibration routines.
rob,
i,ve been plodding along with this idea for to long, am trying to add serial touch input using 14m2 too a little bot am making
again using brass "drawing pins"
.I do need a better touch sensor was thinking off using coper stripes rev ed sells 3mm coper stripes i was thinking off slightly overlay a strip till i made an inch square solder dap each strip then cut into a circle does anyone see a problem making a sensor this way.anyway the problem am having am using is after i calibrate the sensors they was'nt relaible reacting to my touch "hit and miss" to say but when i touch the download socket
" which is in the center of the buttons please see pic" and the sensors they worked every time. I dont know why, but i thought i may roll with it as a feature again'st accendental touch or unwanted little fingers. i.ve had an off the wall idea of adding an 22uf cap on the serial out pin of download socket to ground. but because i not got the project on a breadboard i thought i ask here if adding the cap a good idea or not. so that what i observed and am going to look at some auto calibration routines.rob,