Having sorted the issue I raised in my previous post about a 14M2, I now have a circuit board with a jumper so that pin c.5 can be switched for programming or running. But my circuit is still not behaving as I expect.
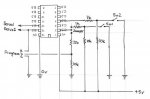
Two simple on/off toggle switches are connected to pins c.3 and c.5 (the latter via the jumper) via a 10k/1k resistor network as per the standard input circuit at the bottom of p26 of the manual -- with the 10k connected to +5v.
Two standard RC servos are connected directly to pins b.0 and b.1, and the servo power leads are also connected directly to +5v and ground.
The AXE027 programming lead is connected to C.5 (serial in) via the jumper, B.0 (serial out) and ground, with resistors as per the manual, and works okay.
Nothing is connected to the other 14M2 pins at the moment, other than +5v and ground.
My simple test program is as follows:-
My problem is that whichever pins I specify in the code, nothing works properly:-
C.3 input and B.1 servo operate as expected if the jumper is in programming position, but not with it in the run position;
All other combinations of C.3, C.5 servo and B.0, B.1 input result in the servo just jerking back and forth at about 1-second intervals, whichever way the switch is set.
I've checked and re-checked my circuit board which, as I said in my previous post, is basically a copy of one I have running with an 08M2, but with extra pins which I need for future extra functions. Any ideas what's going on, please? The program loads okay, but could it still be a damaged 14M2? Unfortunately I've soldered it in, rather than using a socket, so swapping it for another one will probably destroy it.
Two simple on/off toggle switches are connected to pins c.3 and c.5 (the latter via the jumper) via a 10k/1k resistor network as per the standard input circuit at the bottom of p26 of the manual -- with the 10k connected to +5v.
Two standard RC servos are connected directly to pins b.0 and b.1, and the servo power leads are also connected directly to +5v and ground.
The AXE027 programming lead is connected to C.5 (serial in) via the jumper, B.0 (serial out) and ground, with resistors as per the manual, and works okay.
Nothing is connected to the other 14M2 pins at the moment, other than +5v and ground.
My simple test program is as follows:-
Code:
init:
servo b.0,150
main:
if pinc.5 = 1 then
servopos b.0,175
else
servopos b.0,125
endif
pause 2000
goto mainC.3 input and B.1 servo operate as expected if the jumper is in programming position, but not with it in the run position;
All other combinations of C.3, C.5 servo and B.0, B.1 input result in the servo just jerking back and forth at about 1-second intervals, whichever way the switch is set.
I've checked and re-checked my circuit board which, as I said in my previous post, is basically a copy of one I have running with an 08M2, but with extra pins which I need for future extra functions. Any ideas what's going on, please? The program loads okay, but could it still be a damaged 14M2? Unfortunately I've soldered it in, rather than using a socket, so swapping it for another one will probably destroy it.