La concurence a quatre roues motrices !
http://www.picaxeforum.co.uk/showthread.php?24861-4x4-Truck
Damned !
http://www.picaxeforum.co.uk/showthread.php?24861-4x4-Truck
Damned !
Nous aussi ( j'aime bien dire nous, car je considère que la voiture est un peu à vous aussi , vu le travail ) . Tu voulais peut être dire 4 roues directrices .La concurence a quatre roues motrices !
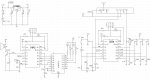
??? Dois je en deduire un condensateur de 100 picoF sur les entrées . Une patte sur le picaxe et l'autre à la masse ?le 100p est INDISPENSABLE, à la masse, sur chaque entrée.
Merci , ca faisait longtemps que je l'avais pas entendu !jeune homme !
Plus que probable. Quand la Chine s'éveillera ... Ben, c'est fait !c'est le jeu dans les potars

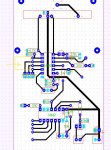
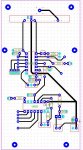
Décidément c'est une manie ! un problème = un typon !!Plz Help . je referais le typon cette nuit pour le sortir demain . je suis en vacances jeudi soir , je voudrais pouvoir finir avant ....
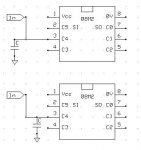
#PICAXE 20M2
'#################################################################################
'######################## Programme Emetteur V4.0 ###########################
'#################################################################################
'########################## configuration ################################
' B_ pour Broche, c'est le nom ou est branché le composant
' E_ pour Etat, c'est la valeur de la broche
' V_ pour variable, ou est enregistrée l'Etat de la broche
'b0 à b7 pour les infos envoyés
'b8 pour comparaison test emission
symbol B_LIAISON = B.3
symbol B_BPcam = PinC.1
symbol B_EN = C.2
symbol B_DONNEE = C.5
symbol B_Vtx = PinC.7
symbol V_Joystick = w13
dirsB = %00001000 'declare B.5 en sortie
dirsC = %00100100 'declare C.2 et C.5 en sortie
'########################## Initialisation ################################
setfreq m32 'Mets la freq à 32Mhz, RFout se met a 4 mzh puis repasse à 32Mhz
Low B_EN
'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
readadc B.0,b1 ' Av/ar voiture ET Haut/Bas caméra Valeur Point Milieu: 124-125
readadc B.5,b3 ' D/G voiture Valeur PM : 106-107
readadc B.1,b5 ' D/G caméra Valeur PM : 100-101-102
bit0 = B_Vtx ' Interrupteur qui active l'emetteur Vidéo
bit1 = B_BPcam ' BP pour tourné la caméra
'##### Test Emission #####
V_Joystick = b1+b3+b5 ' Calcul de la position des joysticks autour de 133
if V_joystick < 328 or V_joystick > 338 or b8<>b0 then ' Verification si on touche ou non a quelques choses ( joystick ou TOR)
time = 0 ' On met le timer a 0
high B_EN ' On active l'emetteur
else
if time > 1 then ' Si on ne touche à rien ET que cela fais plus de 3 secondes qu'on a rien touché
low B_EN ' Alors on desactive le Tx radio
end if
end if
b8 = b0 ' On recopie b0 dans b8 pour effectuer la comparaison
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
loopet en mettant time >=1 ça met 2 secondes ? C'est simplement qu'il ne faut jamais faire un test avec = sur time.time = 1 . pourquoi est ce que ca met 5 secondes pour s'eteindre ? ( pris avec chronometre ) ?
Oui PieM ce n'etait qu'un exemple pour expliquer le probléme , on voit sur le programme fournis que j'ai marqué > et non = .C'est simplement qu'il ne faut jamais faire un test avec = sur time.
En tout cas ce n'est pas ce que je comprends en lisant ca . manuel-PICAXE-tome2-v11 : fonction "disabletime" page 59 .Time ne change pas en fonction du setfreq donc tout ton raisonnement du #857 est faux.
Effet de l'augmentation de vitesse de l'horloge du PICAXE
La fonction time fonctionnera correctement à 4MHz et à 16 Mhz.
A 2MHz ou à 8MHz, l'intervalle sera de 2s
A 32 MHz, l'intervalle sera de 0,5s
Je comprends pas trop ,qu'entends tu par "vrai grandeur" ? j'ai fais déjà énormément de test .Avant de faire une moyenne de tes valeurs ana, fait des tests en vraie grandeur
Je ne connais pas la "moyenne glissante" .d'autant plus qu'il faut dans ce cas faire une moyenne glissante.
exact bizarre !En tout cas ce n'est pas ce que je comprends en lisant ca . manuel-PICAXE-tome2-v11 : fonction "disabletime" page 59 .
pour faire 2s il faut 4 fois 0.5s a 32 MHz donc time >=4. c'est ce que tu observes ?et donc a 32 Mhz time = 2 ( 4x0.5=2) .
Non . j'ai mis time >= 1 . pour faire 2s .pour faire 2s il faut 4 fois 0.5s a 32 MHz donc time >=4. c'est ce que tu observes ?
donc tu n'est pas a 32MHz ! soit cohérentNon . j'ai mis time >= 1 . pour faire 2s .
:
dans le fichier pdf spécifique M2 :Effect of increased clock speed:
The time function will work correctly at 4MHz or 16 MHz.
At 2MHz or 8MHz the interval will be 2s
At 16MHz the interval will be 0.5s
sur le site :Time Variable
The new word variable ‘Time’ increments after every second the program has been running. It can count up to
65535 elapsed seconds (approx 18 hours) before overflowing. To reset simply use ‘let time = 0’. Time increments
every second at both 4MHz and 16MHz. At other clock speeds it will increment differently (e.g. 0.5s at 8MHz).
See: disabletime, enabletime
En plus de ça on ne sait pas comment est gérée cette variable quand la fréquence repasse à 4MHz pendant le RFoutEffect of increased clock speed
The time function will increment every second at 4 MHz or 16 MHz. At 2 MHz and 8 MHz the interval will be 2s, at 32 MHz the time interval will be 0.5s.
Je le suis , je le suis .donc tu n'est pas a 32MHz ! soit cohérent
J'avais déjà posé la question , et si ma mémoire ne me joue pas de tour, il m'avait été indiqué, que la commande passait automatiquement a 4Mhz pour faire le Rfout/In , et ensuite reprennais sa fréquence de croisière ; Mais je n'ai pas les moyens de vérifier ca !!Moi, je ne suis pas sûr du tout, que la fréquence d'horloge "repasse toute seule" a sa valeur (32Mhz, ici) APRES le RFout ...
Allez, trois fils, le petit connecteur qui va bien, et hop ! tu programmes sur site. Cinq minutes, pour gagner des heures (de galère).c'est la galére avec lui car j'ai pas mis de broche pour le programmé sur site
Je suis à la maison , je peux pas ; par contre je peux le prendre et le mettre sur ma breadboardAllez, trois fils, le petit connecteur qui va bien, et hop ! tu programmes sur site. Cinq minutes, pour gagner des heures (de galère).
#PICAXE 14M2
'#################################################################################
'########################## Programme Recepteur ############################
'#################################################################################
'######################## Configuration ########################
dirC.0=0 'declare C.0 en entrée DATA
inputtype %0000000100000000 'met la broche C.0 en mode TDS
'######################## Initialisation ########################
setfreq m4
hi2csetup i2cmaster, %10100000, i2cfast_4, i2cbyte ' met le 14M2 en mode maitre
'####################################################################################################
' Programme Principal
'####################################################################################################
do
high B.5
RFin C.0,b0,b1,b2,b3,b4,b5,b6,b7 ' Enregistre les données du RX
low B.5
pause 100
'sertxd ("b1=",#b1,13,10)
'hi2cout 0,(b0,b1,b2,b3,b4,b5,b6,b7) ' Envoi des données au scratchpad du 20X2 esclave
loop
'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
High B_En
'##### Test Emission #####
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
loop'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
if B_BPcam = 1 then
high B_EN
else
Low B_EN
end if
'##### Test Emission #####
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
loop'#################################################################################
'########################## Programme Principal ############################
'#################################################################################
do
readadc B.0,b1
if B_BPcam = 1 then
high B_EN
else
Low B_EN
end if
'##### Test Emission #####
rfout B_DONNEE,(b0,b1,b2,b3,b4,b5,b6,b7) 'envoi des données par RF
loop