Bonjour à tous,
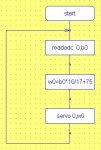
En suivant un document de Thierry Lancelot trouvé je ne sais plus où sur le net, j'ai réalisé le programme en pièce jointe pour commander un servomoteur à partir d'un potentiomètre.
Tout fonctionne correctement à part un léger tremblement/ronflement ( ou pas d'ailleurs ça dépend ) du servomoteur une fois en position.
Je voudrais savoir si ce tremblement/ronflement est normal, s'il y a un problème ou un risque de dégradation de ce dernier.
J'utilise un servomoteur acheté chez A4 technologie ( référencé K-MR-SERVO au cas où ).
Ce serait pour faire un "pan and tilt" maison et pédagogique.
Merci d'avance.
En suivant un document de Thierry Lancelot trouvé je ne sais plus où sur le net, j'ai réalisé le programme en pièce jointe pour commander un servomoteur à partir d'un potentiomètre.
Tout fonctionne correctement à part un léger tremblement/ronflement ( ou pas d'ailleurs ça dépend ) du servomoteur une fois en position.
Je voudrais savoir si ce tremblement/ronflement est normal, s'il y a un problème ou un risque de dégradation de ce dernier.
J'utilise un servomoteur acheté chez A4 technologie ( référencé K-MR-SERVO au cas où ).
Ce serait pour faire un "pan and tilt" maison et pédagogique.
Merci d'avance.
Attachments
-
 32.7 KB Views: 20
32.7 KB Views: 20