kranenborg
Senior Member
The Picaxe "SerialPower" Network combines power delivery and bi-directional communications between processes on intelligent nodes using just two interchangeable wires. In this way, an advanced distributed processing system (based on Picaxe nodes) can be built easily:

This network is based on two - independent - concepts:
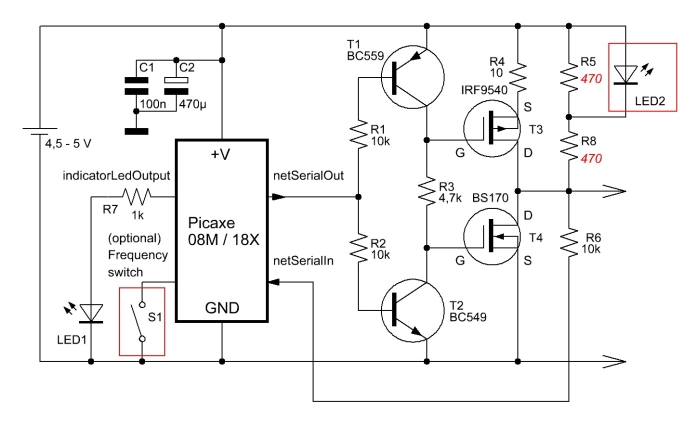
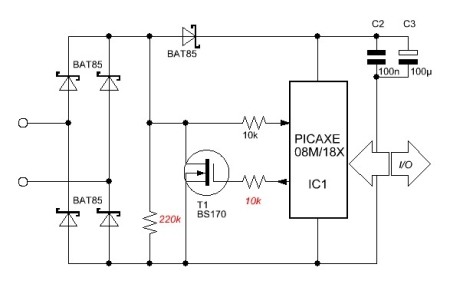
- Networking hardware for linking Picaxe-based nodes transmitting power and data over two non-polarized lines
- Picaxe network software that implements communicating processes on a multi-drop network
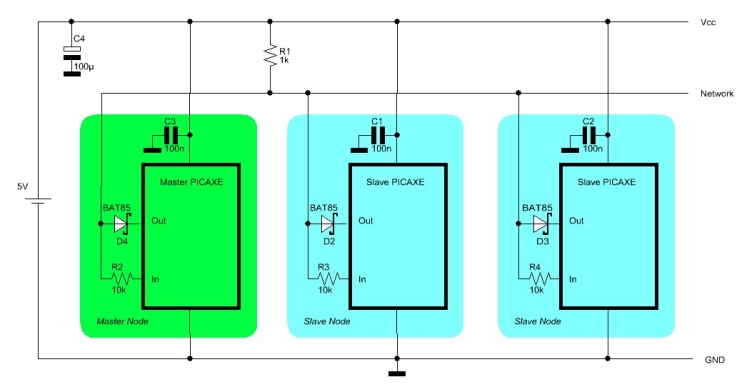
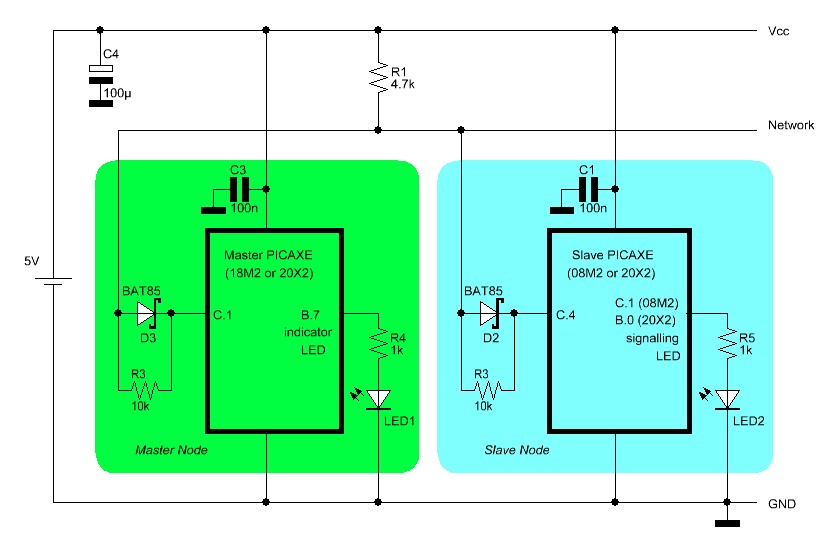
A master node provides for power as well as "timeslots" during which processes on nodes can exchange messages with each other using a standard format. The slave nodes are powered from the network and only need a backup capacitor. Both master and slave nodes can be implemented using any available Picaxe type.
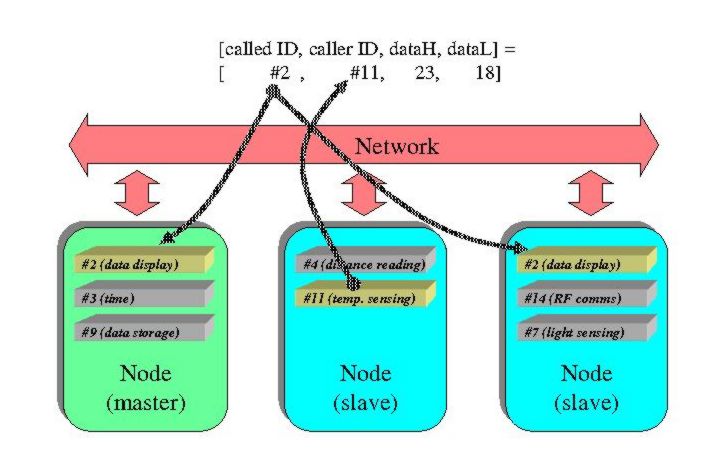
The concept of communicating processes is used (each process has a unique identifier), allowing abstraction from physical nodes and thereby flexible distribution of functionality over different nodes. A node may implement several processes, and the same process may run concurrently on several nodes with local modifications, as shown in the figure below (temperature reading process #11 adresses display process #2 which is distributed over two nodes);
The master node is completely application-independent, any process on a node can exchange information with any process on another node (including slave-slave comms). Message collissions are avoided by assigning each sending process a separate ID-marked timeslot. After network power-up, the master node automatically roams the network for processes that may want to send messages and stores the corresponding process IDs for automatic timeslot generation later on. Furthermore, processes can register or remove timeslots for other processes on the fly as well.
The network software can be configured to use simple three-wire "diode-mixing" networks with separate power and serial communication lines as well, the hardware description page tells more about these options
All information (template code, examples, architecture document, hardware description etc.) can be found through the following up-to-date link:
SerialPower I & II (https://www.kranenborg.org/ee/picaxe/twowirenetwork.htm)
Currently supported versions:
Regards,
Jurjen Kranenborg
This network is based on two - independent - concepts:
- Networking hardware for linking Picaxe-based nodes transmitting power and data over two non-polarized lines
- Picaxe network software that implements communicating processes on a multi-drop network
A master node provides for power as well as "timeslots" during which processes on nodes can exchange messages with each other using a standard format. The slave nodes are powered from the network and only need a backup capacitor. Both master and slave nodes can be implemented using any available Picaxe type.
The concept of communicating processes is used (each process has a unique identifier), allowing abstraction from physical nodes and thereby flexible distribution of functionality over different nodes. A node may implement several processes, and the same process may run concurrently on several nodes with local modifications, as shown in the figure below (temperature reading process #11 adresses display process #2 which is distributed over two nodes);
The master node is completely application-independent, any process on a node can exchange information with any process on another node (including slave-slave comms). Message collissions are avoided by assigning each sending process a separate ID-marked timeslot. After network power-up, the master node automatically roams the network for processes that may want to send messages and stores the corresponding process IDs for automatic timeslot generation later on. Furthermore, processes can register or remove timeslots for other processes on the fly as well.
The network software can be configured to use simple three-wire "diode-mixing" networks with separate power and serial communication lines as well, the hardware description page tells more about these options
All information (template code, examples, architecture document, hardware description etc.) can be found through the following up-to-date link:
SerialPower I & II (https://www.kranenborg.org/ee/picaxe/twowirenetwork.htm)
Currently supported versions:
- SerialPower I: V4.0 (for Picaxe M2 and/or X2 variants), fixed-length (2 byte) messages (September 2018)
- SerialPower II (for Picaxe M2 and/or X2) with variable length messages ranging from 1 to 32 bytes (November 2022)
Regards,
Jurjen Kranenborg
Last edited:
")