marzan
Senior Member
Hello.
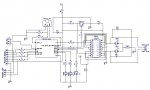
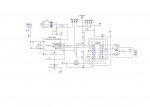
I have a threaded rod with a geared motor attached. I want to send the nut to 4 positions. I was thinking of using ADC to check where the nut is by using a 10K 10 turn potentiometer, that will be geared accordingly, as the shaft needs to make 350 turns from position 1 to position 4. the commands to move will come via wireless remote I have started the schematic while I wait for the components to arrive. Can anyone see anything that`s not right or something that should be included? I want to get a prototype made so can get into the coding when the parts arrive. The picaxe chip will be providing PWM and a tri state pin to the motor driver:
I have a threaded rod with a geared motor attached. I want to send the nut to 4 positions. I was thinking of using ADC to check where the nut is by using a 10K 10 turn potentiometer, that will be geared accordingly, as the shaft needs to make 350 turns from position 1 to position 4. the commands to move will come via wireless remote I have started the schematic while I wait for the components to arrive. Can anyone see anything that`s not right or something that should be included? I want to get a prototype made so can get into the coding when the parts arrive. The picaxe chip will be providing PWM and a tri state pin to the motor driver:
Last edited:
") . The idea is to have all the jumps automatic. The worst part of training dogs is the constant height changing of the jumps /tables which is done manually.
. The idea is to have all the jumps automatic. The worst part of training dogs is the constant height changing of the jumps /tables which is done manually.