Hi all.
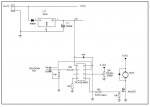
I'm having a few problems controling a motor directly from a 08M2.
Ultimately I intend to run the motor through a L293D but I'm trying to get the general jist of how it works first.
My current code looks like this:
#picaxe 08M2
#no_data
pwmout 2,99,400 'pwm acts on pin 2
Main:
pwmduty 2,400
goto main
The 99 & 400 values are what the PWMWIZARD suggests and I think should run the motor at full speed but when I try the program I only get a fraction of max RPM.
With these values should the motor run as though connected directly to + & - volts & can the 08M2 directly supply enough current to run a motor?
Thanks in anticipation
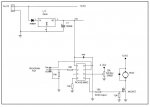
I'm having a few problems controling a motor directly from a 08M2.
Ultimately I intend to run the motor through a L293D but I'm trying to get the general jist of how it works first.
My current code looks like this:
#picaxe 08M2
#no_data
pwmout 2,99,400 'pwm acts on pin 2
Main:
pwmduty 2,400
goto main
The 99 & 400 values are what the PWMWIZARD suggests and I think should run the motor at full speed but when I try the program I only get a fraction of max RPM.
With these values should the motor run as though connected directly to + & - volts & can the 08M2 directly supply enough current to run a motor?
Thanks in anticipation