RacingtoMars
Member
Hi all,
I've been hanging around this forum for a while, and never felt that I had much to contribute. I hope I do now!!
The following project was designed for "Windmill Workshops" to meet STEM, 'process & control' and energy/environment/renewable topics in schools.
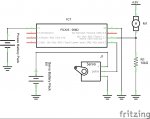
The PICAXE simply measures the voltage that the motor generates, and adjusts the servo accordingly.
All the best,
Craig.
[video=vimeo;116488405]https://vimeo.com/116488405[/video]
I've been hanging around this forum for a while, and never felt that I had much to contribute. I hope I do now!!
The following project was designed for "Windmill Workshops" to meet STEM, 'process & control' and energy/environment/renewable topics in schools.
The PICAXE simply measures the voltage that the motor generates, and adjusts the servo accordingly.
All the best,
Craig.
[video=vimeo;116488405]https://vimeo.com/116488405[/video]
Code:
'============ ServoPointer.bas ============
'This programme is designed to read a small voltage via the ADC
'and operate a servo to act as a pointer.
'Thus creating an incredibly large, and inaccurate voltmeter!
'Code written by Craig Marston, from ideas shared on www.picaxeforum.co.uk
'inspired by R.J. Hackett and his "Evil Genius Guide to Picaxe" book
'=== Constants === DON'T BUGGER ABOUT WITH THESE SETTINGS!
symbol ADCval = b0 ;the analogue value read from the windmill
symbol pointy = b1 ;the value sent to the servo
symbol b1L = b2 ;declaring symbols for the variables
symbol b1H = b3 ;to make them easier to understand
symbol ADCrange = b4 ;For 8-bit this will be 255, which is set later!
symbol Rout = b5 ;Output range of the servo as set later
' NOTE: Anything that has "CONFIGURE" in the comments is for tweeking!
'=== Initialisation ===
servo C.2, 155 'CONFIGURE - start servo, pin 2, central-ish position. Required prior to servopos command
fvrsetup FVR1024 'set to 1.024 V
adcconfig %011 'set FVR (Fixed Voltage Reference) as the ADC +Vref, 0V for -Vref
'=== Variables ===
b1L = 80 'CONFIGURE - the servo's lowest value, tweek for each individual device
b1H = 235 'CONFIGURE - the servo's highest value, tweek for each individual device
ADCrange = 255 'input range of the ADC which is 2^8 (i.e. 256 steps)
Rout = b1H - b1L 'output range EQUATION determined by b1H & b1L
'=== Directives ===
#picaxe 08M2 'specifies the processor used
#terminal 4800 'open terminal window to see what's occurring on the computer
'=== The Main Programme ===
main:
readadc C.1, ADCval 'read the voltage (ADC value 0-255) into variable b0
ADCval = ADCval * 1 'CONFIGURE - increase sensitivity by multiplying the ADC value if required
ADCval = 255 - ADCval 'inverses the ADC reading otherwise the servo rotates the wrong way!
pause 50 'calm down a bit - slight pause between readings
pointy = Rout * ADCval / ADCrange + b1L 'EQUATION (affine transform) to convert the full 8-bit range of the ADC (256) to the smaller servo range (around 150 or so)
if ADCval <> b6 then 'update the position only if there's a change between the two variables
gosub MoveThen 'go to the subroutine "pointer" if the above statement is true
endif 'end the "if" procedure
b6 = ADCval 'update variable b6 from the ADC value currently in variable b0
sertxd (#ADCval,cr,lf) 'send ADCval to Terminal Window
goto main 'start the procedure all over again!
MoveThen:
servopos C.2, pointy 'servo position as determined by the value in variable b1
return 'return to the main procedure
Last edited by a moderator: