kranenborg
Senior Member
Hello,
In this thread my son Joost and I want to introduce our near-space PongSat-18x project. We have several questions and hope that forum members are willing to join in design discussions; we'll keep you informed about our progress. The idea is that this miniature 18X-based satellite will fly within a month towards near-space.
A pongsat (http://www.jpaerospace.com/pongsat/index.htm) is an experiment that fits inside a pingpong ball and will be flown to the near-space area (about 30 kms high if we are lucky) free of charge by company called JPAerospace. There have been some Basic Stamp and picaxe-based pongsats before. They have recorded the temperature at the beginning of the trip in the air; at some point the temperature gets so low that an ordinary battery freezes and thus the experiment finishes, long before the highest altitude has been reached.
We have registered for the planned flight of 2 May, and we decided to aim a little bit higher. Our goals are:
- To develop a picaxe-based pongsat that functions properly through the *whole* flight (this implies that very low temperatures (-70 Degr. C or less) may be encountered),
- To do a large number of measurements (not just temperature) very regularly and thus learn about the atmosphere.
- To test a number of sensors for their appliccability
- To run the project like a real space project, i.e. build and test prototypes thoroughly and under "harsh conditions", thorough preparation etc.
Like in a real space projects there is the risk of total failure in several stages, but that's what we happily take for given ;o) The road towards it is as exciting as the final flight and data retrieval.
Here are some impressions of our designs:
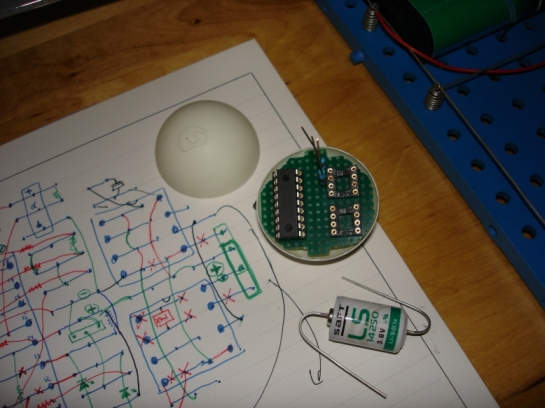
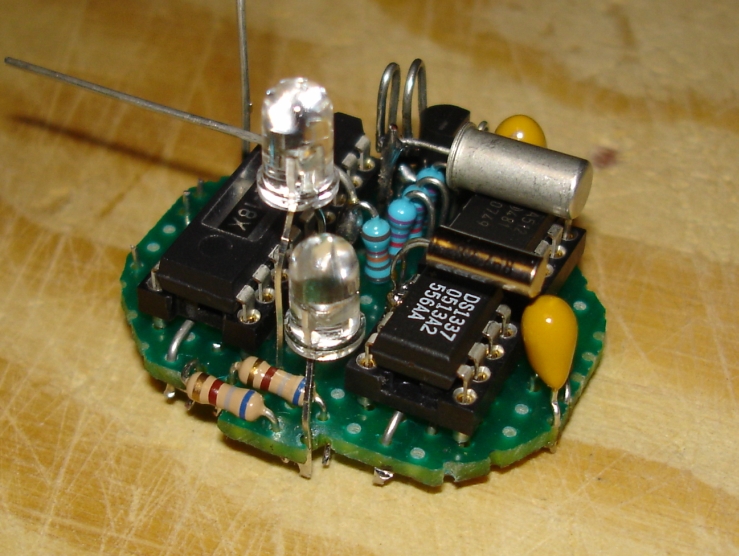
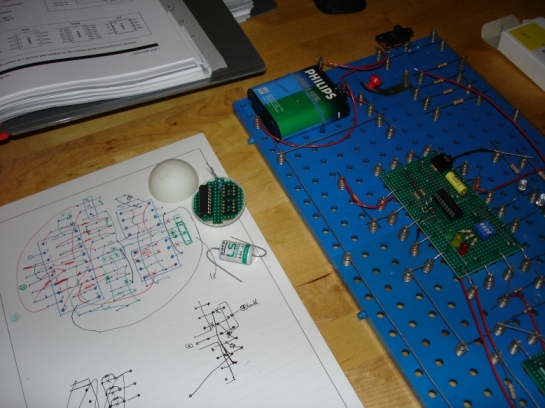
picture 1: Pongsat, print layout scetch and special battery that fits within the PongSat
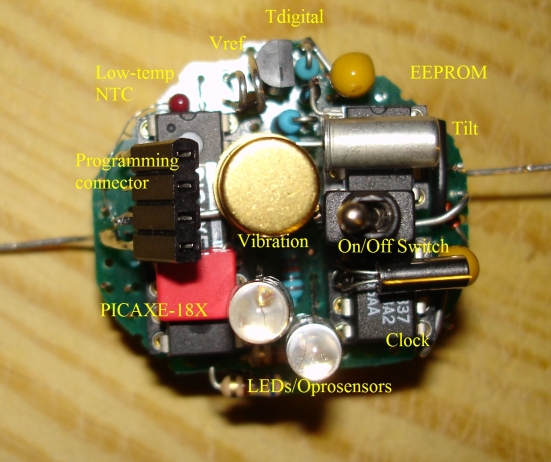
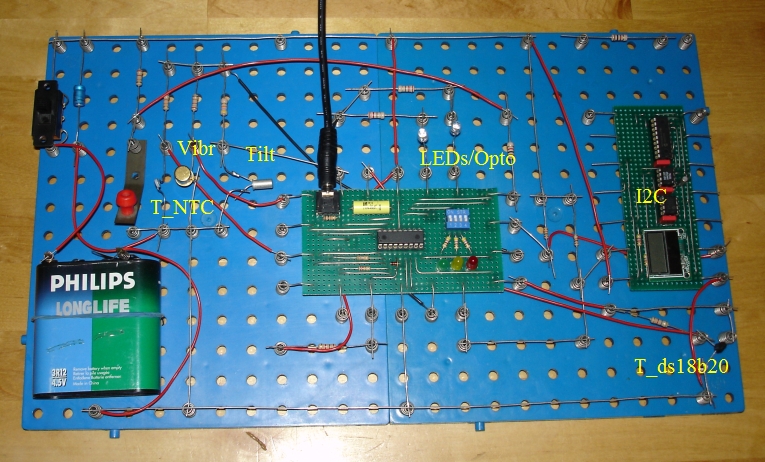
picture 2: Project elements: prototype testing model (based on Philips EE system, http://www.kranenborg.org/ee/ , with identical circuit)
Central to the idea is a PICAXE-18X based flight computer that is designed for very harsh conditions: low voltage due to very low temperatures. The computer is powered by a special Lithium polymer battery that has a guaranteed functionality down to -65 degs C !
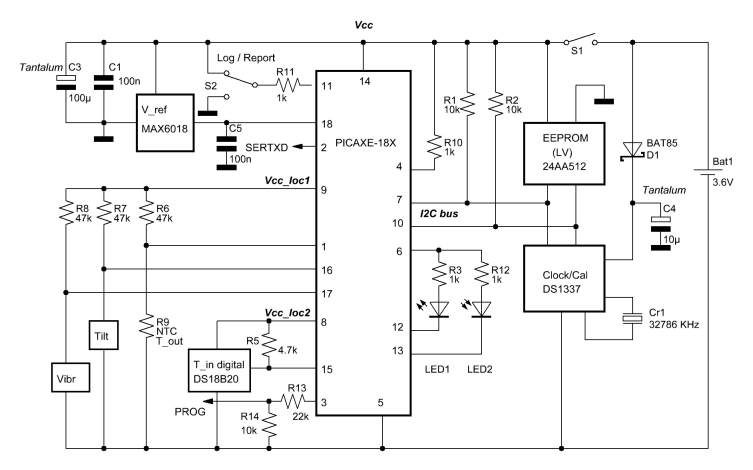
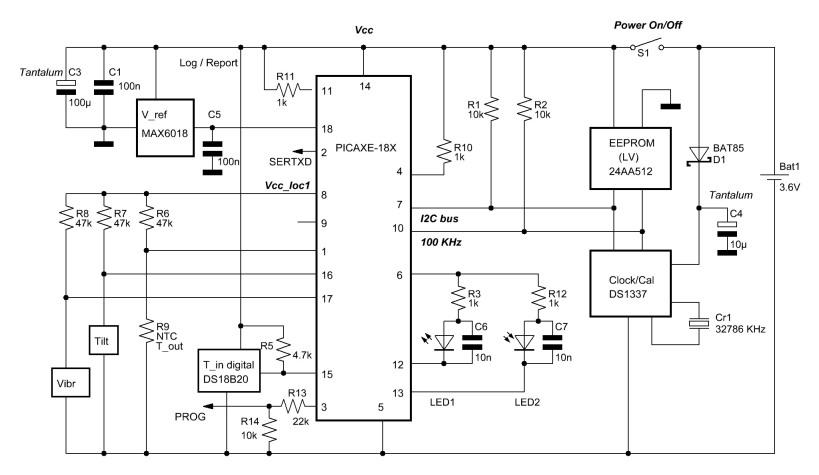
picture 3: Circuit diagram
The circuit reveals that the flight computer has similarities with Rev-Eds datalogger kit, however we use different components that can operate under very low voltages (1.8V); the battery can operate at very low temperatures but the voltage drop at low temperatures is considerable as well and may be below the "standard" 2.7V limit.
The computer has 7 sensors (whereof 4 analog), all served by the 18X (how? thanks to hippy's pokings, see the following link: http://www.picaxeforum.co.uk/showthread.php?t=9086 ):
- Internal temperature (digital, DS18B20)
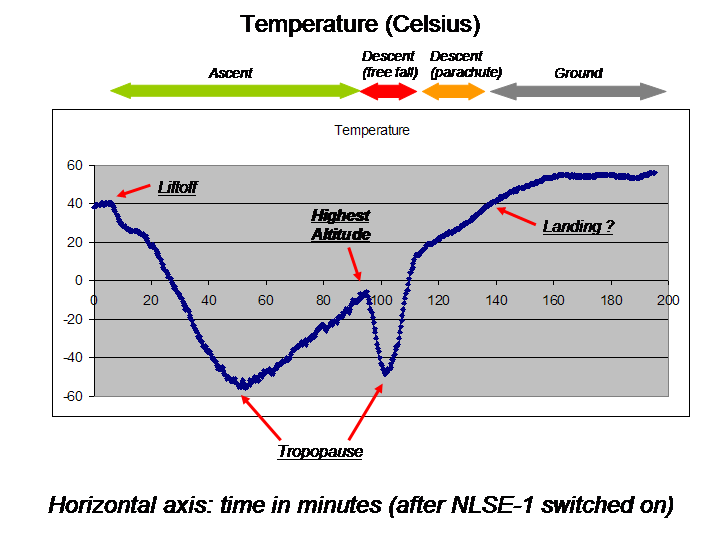
- External temperature (analog, thermistor outside)
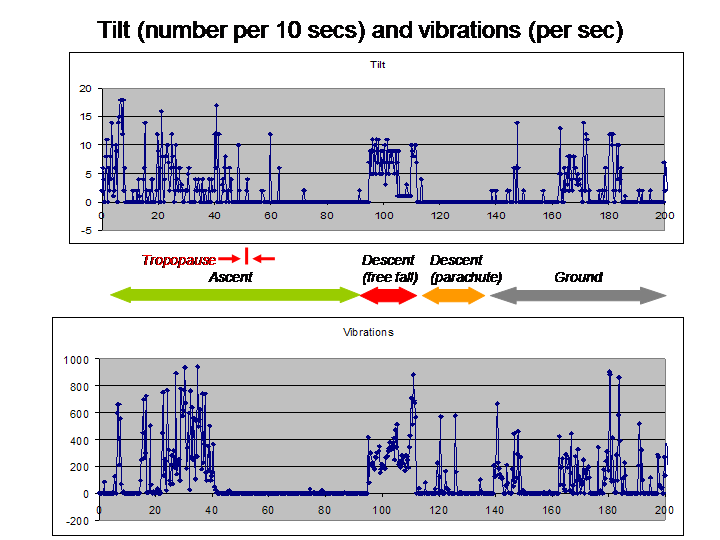
- Tilt sensor (internal, requires the pongsat to be in fixed position), to indirectly measure wind effect, obtained via Rev-Ed
- Vibration sensor (another way of indirectly measuring wind speed, also via Rev-Ed)
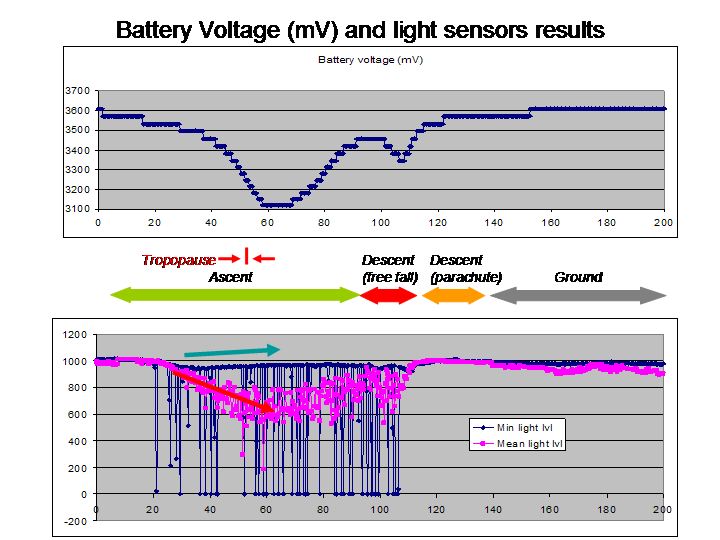
- Two light sensors (using LEDs with inverse charging/discharging) to measure darkening effect at high altitudes (inspired by wilf_nv, see http://www.picaxeforum.co.uk/showthread.php?t=5945 ). The LED will also be used in a normal way to indicate proper functioning at start-up
- Battery voltage monitoring for measuring voltage drop at low temperatures (Using MAX6018 voltage reference device)
All information will be stored in the special low-voltage 24AA512 EEPROM with an interval of approx. 20 secs.
As you can see development is at full speed now (I'll do mostly hardware, Joost has begun programming, we do the prototype model together), we'll come back soon with a lot of issues that we would like to get help with. Meanwhile we are open for any discussions on the design!
Jurjen & Joost Kranenborg
In this thread my son Joost and I want to introduce our near-space PongSat-18x project. We have several questions and hope that forum members are willing to join in design discussions; we'll keep you informed about our progress. The idea is that this miniature 18X-based satellite will fly within a month towards near-space.
A pongsat (http://www.jpaerospace.com/pongsat/index.htm) is an experiment that fits inside a pingpong ball and will be flown to the near-space area (about 30 kms high if we are lucky) free of charge by company called JPAerospace. There have been some Basic Stamp and picaxe-based pongsats before. They have recorded the temperature at the beginning of the trip in the air; at some point the temperature gets so low that an ordinary battery freezes and thus the experiment finishes, long before the highest altitude has been reached.
We have registered for the planned flight of 2 May, and we decided to aim a little bit higher. Our goals are:
- To develop a picaxe-based pongsat that functions properly through the *whole* flight (this implies that very low temperatures (-70 Degr. C or less) may be encountered),
- To do a large number of measurements (not just temperature) very regularly and thus learn about the atmosphere.
- To test a number of sensors for their appliccability
- To run the project like a real space project, i.e. build and test prototypes thoroughly and under "harsh conditions", thorough preparation etc.
Like in a real space projects there is the risk of total failure in several stages, but that's what we happily take for given ;o) The road towards it is as exciting as the final flight and data retrieval.
Here are some impressions of our designs:
picture 1: Pongsat, print layout scetch and special battery that fits within the PongSat
picture 2: Project elements: prototype testing model (based on Philips EE system, http://www.kranenborg.org/ee/ , with identical circuit)
Central to the idea is a PICAXE-18X based flight computer that is designed for very harsh conditions: low voltage due to very low temperatures. The computer is powered by a special Lithium polymer battery that has a guaranteed functionality down to -65 degs C !
picture 3: Circuit diagram
The circuit reveals that the flight computer has similarities with Rev-Eds datalogger kit, however we use different components that can operate under very low voltages (1.8V); the battery can operate at very low temperatures but the voltage drop at low temperatures is considerable as well and may be below the "standard" 2.7V limit.
The computer has 7 sensors (whereof 4 analog), all served by the 18X (how? thanks to hippy's pokings, see the following link: http://www.picaxeforum.co.uk/showthread.php?t=9086 ):
- Internal temperature (digital, DS18B20)
- External temperature (analog, thermistor outside)
- Tilt sensor (internal, requires the pongsat to be in fixed position), to indirectly measure wind effect, obtained via Rev-Ed
- Vibration sensor (another way of indirectly measuring wind speed, also via Rev-Ed)
- Two light sensors (using LEDs with inverse charging/discharging) to measure darkening effect at high altitudes (inspired by wilf_nv, see http://www.picaxeforum.co.uk/showthread.php?t=5945 ). The LED will also be used in a normal way to indicate proper functioning at start-up
- Battery voltage monitoring for measuring voltage drop at low temperatures (Using MAX6018 voltage reference device)
All information will be stored in the special low-voltage 24AA512 EEPROM with an interval of approx. 20 secs.
As you can see development is at full speed now (I'll do mostly hardware, Joost has begun programming, we do the prototype model together), we'll come back soon with a lot of issues that we would like to get help with. Meanwhile we are open for any discussions on the design!
Jurjen & Joost Kranenborg
Last edited:

")