Je ne pense pas :Mais physiquement je pense qu'on a le même problème sur Y que sur X, c'est à dire que les deux composantes de g et gamma centrifuge s'additionnent pour redonner g !
- sur un objet à l'arrêt, l'accélération suivant X varie en + et en - quand on bascule la moto, le zéro correspondant à la moto verticale.
- toujours sur un objet immobile, l'accélération suivant Y est de 1g et diminue quand on bascule la moto.(en supposant qu'un gars musclé la retienne en utilisant une force verticale appliquée sur la partie supérieure de la moto)
- sur une moto en équilibre en mouvement : l'accélération suivant X est voisine de zéro, et les écarts permettent difficilement (ou ne permettent pas) de savoir de quel coté la moto penche.
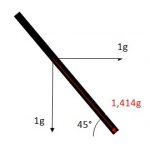
- par contre, l'accélération suivant Y augmente régulièrement au fur et à mesure que la moto penche (pour contrer l'effet de la force centrifuge) (et si on insiste un peu trop, ça fini par déraper comme vu sur la photo...) A 45°, on doit être à 1,414 g ce qui doit être mesurable.
- le gyro est utile pour déterminer de façon fiable de quel coté la machine penche. c'est très facile d'intégrer l'angle : c'est une simple addition dans un timer.
- la dérive inévitable peut être remise à zéro chaque fois que la moto repasse par une position verticale, ce qui arrive forcément au moins toutes les quelques secondes
Last edited:


 40 ms pour faire la moyenne de 200 mesures ana, ça fait 2 mètres à 200 km/h. On doit avoir de la marge même à Chamblay !
40 ms pour faire la moyenne de 200 mesures ana, ça fait 2 mètres à 200 km/h. On doit avoir de la marge même à Chamblay !