I have been constantly searching the Internet and forums for how to integrate an 18m2+ with a motion plus.
I have recently connected a nunchuck to it and got it working well but it has a huge dead zone in the middle so instead i would like to use a motion plus to stabilise my quadrotor.
I have found some arduino code for the motion plus that says it starts at directory $53 and then once initialized moves to directory $52.
my code is on my other pc but off the top off my head looks like this
Init:
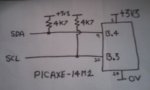
I2cslave $53,i2cslow,i2cbyte
Write i2c 0xF0,(0x55)
Pause 10
Writei2c 0xfb,(0x00)
Pause 10
I2cslave $52,i2cslow,i2cbyte
Main:
Writei2c 0,(0)
Pause 10
Readi2c (b0,b1,b2,b3,b4,b5)
Pause 10
Debug
Goto main
But all I get is 255 in most variables
As far as I know there are no other posts that I could find anywhere
Thanks in advance
Here is some of the resources I've been using
http://wiibrew.org/wiki/Wiimote/Extension_Controllers
http://www.musclera.com/wii-motionplus-demonstration/
http://arduino.cc/forum/index.php/topic,8661.0.html
I have recently connected a nunchuck to it and got it working well but it has a huge dead zone in the middle so instead i would like to use a motion plus to stabilise my quadrotor.
I have found some arduino code for the motion plus that says it starts at directory $53 and then once initialized moves to directory $52.
my code is on my other pc but off the top off my head looks like this
Init:
I2cslave $53,i2cslow,i2cbyte
Write i2c 0xF0,(0x55)
Pause 10
Writei2c 0xfb,(0x00)
Pause 10
I2cslave $52,i2cslow,i2cbyte
Main:
Writei2c 0,(0)
Pause 10
Readi2c (b0,b1,b2,b3,b4,b5)
Pause 10
Debug
Goto main
But all I get is 255 in most variables
As far as I know there are no other posts that I could find anywhere
Thanks in advance
Here is some of the resources I've been using
http://wiibrew.org/wiki/Wiimote/Extension_Controllers
http://www.musclera.com/wii-motionplus-demonstration/
http://arduino.cc/forum/index.php/topic,8661.0.html
Last edited: