I'm attempting to put a tach on my lathe using a hall effect sensor. I should be getting an RPM range of 60 to 600 but I'm only getting 60 to 180. And the output is very intermittent and jumpy.
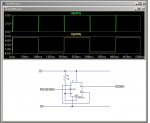
The pulses look good (to me...):

Here is the relevant part of the code:
I guess this could be done with PULSIN but I'm unsure of the math or if a Picaxe will measure the correct part of the waveform. With real numbers I'd do: RPM=60/(pulse/1000)...
Any ideas?
The pulses look good (to me...):
Here is the relevant part of the code:
Code:
count HallPin, 1000, RPMCount 'pulses in second
RPMCount = RPMCount * 60 'pulses in 1 minute
BinToASCII RPMCount,Dis10000,Dis1000,Dis100,Dis10,Dis1
serout LCDpin, t9600_8,(254,192, "RPM:",Dis1000,Dis100,Dis10,Dis1)Any ideas?
")