Hi there.
I've long been a fan of picaxe, and RC flying stuff. So what about combining them?
I have a drone for aerial footage, a DJI Phantom 2 vision +.
The transmitter is a basic RC quad transmitter with no way to do mixes on the channels.
In one of the sticks of the remote, when I turn it, its like doing a panoramic with a camera. But.. I want to only turn the stick like 10%.. anymore and the movement is too fast.
I wanna add a switch to my remote, that does exactly that: limit the travel of the stick to 10%.
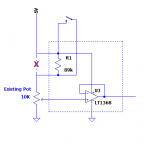
The sticks are basically connected to normal POTs.
Is there a way I can achieve this with picaxes?
THanks in advance
I've long been a fan of picaxe, and RC flying stuff. So what about combining them?
I have a drone for aerial footage, a DJI Phantom 2 vision +.
The transmitter is a basic RC quad transmitter with no way to do mixes on the channels.
In one of the sticks of the remote, when I turn it, its like doing a panoramic with a camera. But.. I want to only turn the stick like 10%.. anymore and the movement is too fast.
I wanna add a switch to my remote, that does exactly that: limit the travel of the stick to 10%.
The sticks are basically connected to normal POTs.
Is there a way I can achieve this with picaxes?
THanks in advance
")
