Typically RC airplane pilots that fly combustion engines have no clue how much fuel they have left.
They fill the tank at start of the flight, take off, and use a timer to tell them when to land the plane.
On a nice sunny day when life is easy they land the plane and discover the tank is still 3/4 full.
On a windy day, when adrenaline rushes through the pilot, an in air motor out (fuel empty) is not uncommon.
And recovery of that plane is sometimes hard.....
How different is that with RC planes that fly electro (battery) powered. Modern transmitters have telemetry (even the USD 50 ones) that show
actual battery status, and you can put an alarm to that.
I set out to find a solution to that problem. The result is this circuit.
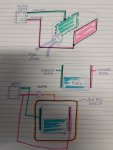
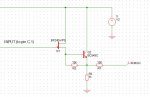
This circuit is a PICAXE 08M2 based interface that measures the fuel level in the airplane tank, and translates it into a voltage.
The voltage level is proportional with the fuel level in the tank.
This first first post will show the circuit diagram, successive posts will contain an explanation, and implementation, and the code.
They fill the tank at start of the flight, take off, and use a timer to tell them when to land the plane.
On a nice sunny day when life is easy they land the plane and discover the tank is still 3/4 full.
On a windy day, when adrenaline rushes through the pilot, an in air motor out (fuel empty) is not uncommon.
And recovery of that plane is sometimes hard.....
How different is that with RC planes that fly electro (battery) powered. Modern transmitters have telemetry (even the USD 50 ones) that show
actual battery status, and you can put an alarm to that.
I set out to find a solution to that problem. The result is this circuit.
This circuit is a PICAXE 08M2 based interface that measures the fuel level in the airplane tank, and translates it into a voltage.
The voltage level is proportional with the fuel level in the tank.
This first first post will show the circuit diagram, successive posts will contain an explanation, and implementation, and the code.
Attachments
-
 355.7 KB Views: 49
355.7 KB Views: 49
Last edited: