The start of my timing findings
OK, here's the circuit I used:
On the breadboard, there is a 28x1 (the test picaxe) and an 08m (for the timing).
I connected out0 of the 28x1 to in3 of 08m. I programmed testing code in the 28x1, and a pulse-reader in the 08m:
08m Time recorder:
Code:
setfreq m8
main:
pulsin 3,1,w0
serout 0,n2400,(#w0,13,10)
goto main
Test picaxe: 28x1
Code:
main:
high 0
'command to be tested goes here
low 0
pause 550
goto main
To get the durations of each command, I looked at the numbers on the terminal screen, and e.g. If I roughly see two 58s every time I see eight 57s, I type in 57.2.
Time without a test command (testing space left blank, just sequent HIGH 0 and LOW 0): 57.2
Here are the results. it is - (Command): (number recorded) =(number minus 57.2)
Code:
high 1: 115.1 =57.9
high 2: 124 =66.9
high 3: 124 =66.9
high 4: 124 =66.8
high 5: 124 =66.8
high 6: 124 =66.8
high 7: 124 =66.8
low 1: 114.9 =57.7
low 2: 123.9 =66.7
low 3: 123.9 =66.7
low 4: 123.9 =66.7
low 5: 123.9 =66.7
low 6: 123.9 =66.7
low 7: 123.9 =66.7
toggle 1: 116.5 =59.3
toggle 2: 125.4 =68.2
toggle 3: 125.4 =68.2
toggle 4: 125.4 =68.2
toggle 5: 125.4 =68.2
toggle 6: 125.4 =68.2
toggle 7: 125.4 =68.2
pins=%00000001: 144.5 =87.3
EDIT: The numbers shown are in multiples of 5us (0.005ms), so 57.9 /200 =0.2895ms, or 57.9 *5 =289.5us
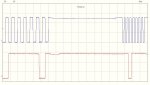
What I've recently measured with my oscilloscope is the VFD datalines, and the brushless motor's middle point. For anyone who is interested, I've attached a waveform image showing sbt vs sbi1.
")