Bonjour à tous ,
Pour ceux qui suivent mes aventures . Je finalise la télécommande qui j'espere cette fois seras bonne pour les tests ;
En attendant, je reflechie et j'avance un peu sur la suite du projet ,et notamment sur la création de ma plaquette d'essai pour tester cette fameuse télécommande ;
Un point clef, se situe dans le pilotage des servo , avec un nouveau composant dédié a cela : le SD20
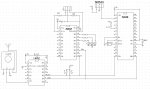
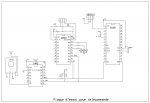
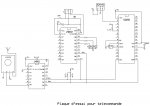
Actuellement sur ma plaquette de test j'ai mis le recepteur de télécommande, un 14M2 en maitre pour recuperer le RFin et ecrire sur l"esclave, un 20X2 en esclave pour la liaison i2C et envoyer les ordres . j'ai sur ma plaquette AXE091 trois led qui me serviront pour voir le focntionnement de la télécommande.
Je souhaite rajouté le SD20 sur cette plaquette , pour comprendre le focntionnement de celui-ci ; je raccorderai un servo pour les tests .
Mais avant tout j'ai quelques questions metaphysiques comme d'habitude .
Par exemple . une liaison I2C peut elle recevoir de µC et envoyer des infos sur un Autre ?
Dans mon cas : le 20X2 recoit les ordres par le 14M2 reception , mais il doit ( le 20X2) envoyé des ordres au SD20 en I2C aussi . En hard est cequ'un branchement comme cela est bon ?
Je sais pas si les R de 4.7K sont de nouveau nécessaire ?
J'ai respecté les note de la doc , le condo de decouplage sur l'alim , le mise a Vcc de servo 5 par une pullup de 4.7K.
Les trois diodes sont deja sur la plaquette d'essai d'origine( AXE 091) ; Vraiment super pratique cette plaquette , je la conseille a tout le monde.
Merci à vous
Pour ceux qui suivent mes aventures . Je finalise la télécommande qui j'espere cette fois seras bonne pour les tests ;
En attendant, je reflechie et j'avance un peu sur la suite du projet ,et notamment sur la création de ma plaquette d'essai pour tester cette fameuse télécommande ;
Un point clef, se situe dans le pilotage des servo , avec un nouveau composant dédié a cela : le SD20
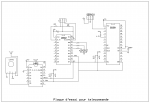
Actuellement sur ma plaquette de test j'ai mis le recepteur de télécommande, un 14M2 en maitre pour recuperer le RFin et ecrire sur l"esclave, un 20X2 en esclave pour la liaison i2C et envoyer les ordres . j'ai sur ma plaquette AXE091 trois led qui me serviront pour voir le focntionnement de la télécommande.
Je souhaite rajouté le SD20 sur cette plaquette , pour comprendre le focntionnement de celui-ci ; je raccorderai un servo pour les tests .
Mais avant tout j'ai quelques questions metaphysiques comme d'habitude .
Par exemple . une liaison I2C peut elle recevoir de µC et envoyer des infos sur un Autre ?
Dans mon cas : le 20X2 recoit les ordres par le 14M2 reception , mais il doit ( le 20X2) envoyé des ordres au SD20 en I2C aussi . En hard est cequ'un branchement comme cela est bon ?
Je sais pas si les R de 4.7K sont de nouveau nécessaire ?
J'ai respecté les note de la doc , le condo de decouplage sur l'alim , le mise a Vcc de servo 5 par une pullup de 4.7K.
Les trois diodes sont deja sur la plaquette d'essai d'origine( AXE 091) ; Vraiment super pratique cette plaquette , je la conseille a tout le monde.
Merci à vous