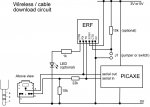
Notes on using the ERF for PICAXE programming
1) When used with a URF module the baud rate for downloads/debug/serial terminal etc. is
set automatically on the ERF (via an automatic wireless command from the URF to the
ERF) when the URF COM port is opened by the computer. Therefore there is no need to
configure the baud rate manually on the ERF (i.e. no need to set the baud rate via AT
commands when paired with a URF).
2) When an ERF resets it will always use the default baud rate stored in it’s EEPROM
(factory setting 9600) until the URF instructs it to change. Therefore if, for instance, the
PICAXE Editor ‘Serial Terminal’ opens the URF COM port at 4800 the ERF will then
automatically change to 4800 and start transmitting data at 4800 as expected. However if
the ERF is powered down, and then re-powered whilst the Serial Terminal on the
computer remains open the ERF will default back to 9600 baud and the transmitted data
will no longer be at the expected 4800. In this situation it is necessary to simply close and
re-open the COM port (Serial Terminal) to force the URF to instruct the ERF to change its
baud rate again.
3) To perform a ‘power-on’ wireless hard-reset of the PICAXE chip the ERF must still
remain powered. In other words only reset the power to the PICAXE chip itself, not the
whole circuit.
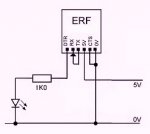
4) The DTR pin can supply an absolute maximum of 4mA to drive the optional activity LED.
Therefore an external 1k resistor is recommended in series with the LED. Drawing a
larger current may cause unreliable operation.
5) The CTS ‘chip enable’ pin has a ‘weak’ internal pull up resistor, and so the external 10k
pull-up is optional. However we recommend adding it to provide a ‘strong’ pull-up in the
circuit.
6) To use two or more URF/ERF pairs in close proximity (e.g. in a classroom for 2 remote
robots) each pair should be configured to use a different frequency via the URF
configuration wizard, which is a free download from
www.picaxe.com/downloads/urf.zip.
The default frequency is 868.3MHz and this is the frequency the antenna is optimised for.
Other available frequencies that work well with the on-board chip antenna are 868, 915
and 903. However in a short range (e.g. 10m or so within a classroom) very different
frequencies such as 315 and 434 will also function, giving up to 6 default pair options.