Patrice Jean-Paul
Active member
Bonjour Messieurs,
Je cherche à implémenter l'algorithme de la fonction PWM dans un programme.
On possède un Wizard qui donne les paramètres <-> fréquence voulue mais on a pas l'algorithme.
Est-ce que c'est une fonction:
Cas 1 : P0=N1 , R0=N2 , ensuite on fait une boucle B1
Boucle B1: tant que P > 255 or R>1023 faire { P=P/4 ; R = R/4 ; DivX=DivX+1 }
Cas 2: P0=N1, R0=N2 , ensuite on fait une boucle B2 , ensuite on fait P=P-1 et R=R-1
Boucle B2: tant que P > 256 or R>1024 faire { P=P/4 ; R = R/4 ; DivX=DivX+1 }
Dans mon cas:
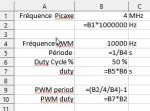
N1=40000; N1=N1/Vitesse; N1=N1*25;
N2=N1*2
Je pense que c'est plutôt le cas 2 qui est le plus logique.
Ce que je suppose:
La durée "On" du pulse va du compteur P = 0 à 255
La durée "Off" du pulse va du compteur R = 0 à 1023 (ou la durée "On"+"Off" ) ?
Quoi que je fasse je n'arrive pas à retrouver exactement les paramètres du Wizard
Quelqu'un sait il exactement ?
Rq: Je pense que l'algo devrait être donné dans les spécifs.
Nb: je peux donner les sources si besoin.
Bien cordialement,
Patrice
Je cherche à implémenter l'algorithme de la fonction PWM dans un programme.
On possède un Wizard qui donne les paramètres <-> fréquence voulue mais on a pas l'algorithme.
Est-ce que c'est une fonction:
Cas 1 : P0=N1 , R0=N2 , ensuite on fait une boucle B1
Boucle B1: tant que P > 255 or R>1023 faire { P=P/4 ; R = R/4 ; DivX=DivX+1 }
Cas 2: P0=N1, R0=N2 , ensuite on fait une boucle B2 , ensuite on fait P=P-1 et R=R-1
Boucle B2: tant que P > 256 or R>1024 faire { P=P/4 ; R = R/4 ; DivX=DivX+1 }
Dans mon cas:
N1=40000; N1=N1/Vitesse; N1=N1*25;
N2=N1*2
Je pense que c'est plutôt le cas 2 qui est le plus logique.
Ce que je suppose:
La durée "On" du pulse va du compteur P = 0 à 255
La durée "Off" du pulse va du compteur R = 0 à 1023 (ou la durée "On"+"Off" ) ?
Quoi que je fasse je n'arrive pas à retrouver exactement les paramètres du Wizard
Quelqu'un sait il exactement ?
Rq: Je pense que l'algo devrait être donné dans les spécifs.
Nb: je peux donner les sources si besoin.
Bien cordialement,
Patrice
 iv4, 2
iv4, 2