One of my pastimes is working on and exhibiting my model railway "Angst-Lesspork", which is a tribute to the Discworld books of the late Sir Terry Pratchett.
The witch on her on her broomstick going up and down is always a crowd-pleaser. However up to date, it relies on the operator having a free hand to either gently pull the cord at the rear of the layout (to make the stick go up) or let it go - again gently - down.
So; could I motorise the effect? I considered using a motor and gearbox to wind the cord in and out, but then someone suggested I could use a servo motor as they were quiet cheap these days. My investigations revealed that I could get a miniature servo for around £6 and also that my preferred microcontroller, the PicAXE can drive a servo using just a resistor. Great!
I bought a servo and breadboarded a suitable circuit to familiarise myself with using the servo. After an initial set-back using the in-built servo commands, I received a work-round solution from the PicAXE user forum and made up a working system.
The witch moves through 60 mm, so I made an actuator arm out of 3mm plywood long enough to encompass that distance when rotated by the servo through about 90 degrees (actually more like 95 degrees) The arm is fixed to one of the plastic actuators that came with the servo.
The PicAXE is programmed to move the arm from one end to the other at pseudo random intervals of up to 65 seconds. There is a s.p.d.t. switch that can be used to force the system to go to one or other of the positions and stay there.
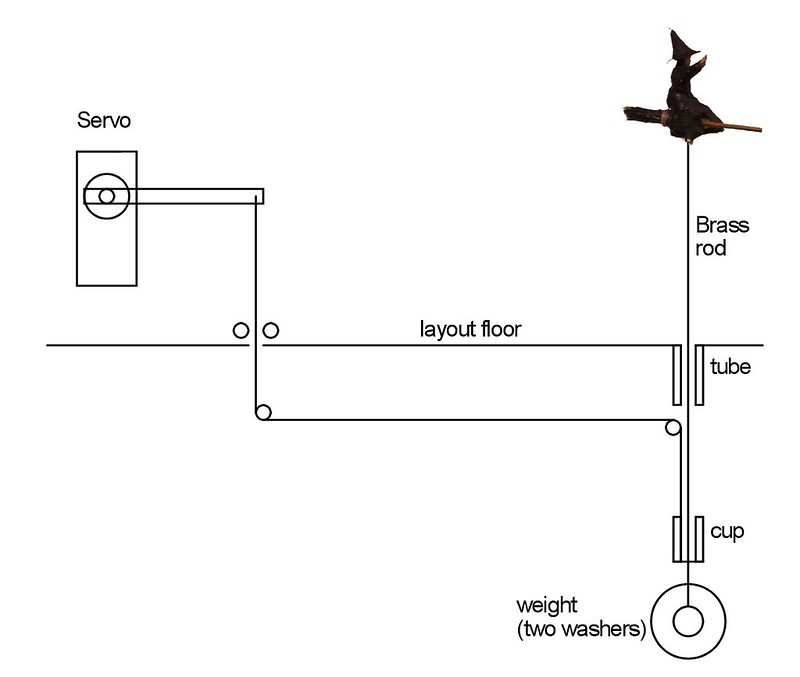
Here's a sketch showing the working details.
 Broomstick driver by H Norwood, on Flickr
Broomstick driver by H Norwood, on Flickr
The witch and broomstick are mounted on the end of a length of 0.45mm brass wire, which passes through a collar in the baseboard. The lower end of the wire sits in a short length of "cotton bud" tube which itself is tied onto the end of a length of cord. A counterweight made of a couple of "penny" washers adds enough weight to ensure the witch descends nice and smoothly.
The cord passes over a couple of rollers and is passed through the baseboard and is hooked over the end of the servo arm. In transit, the witch and wire are stored in one stock box, whilst the cord is unhooked from the servo arm, pulled tight at the rear and held fast.
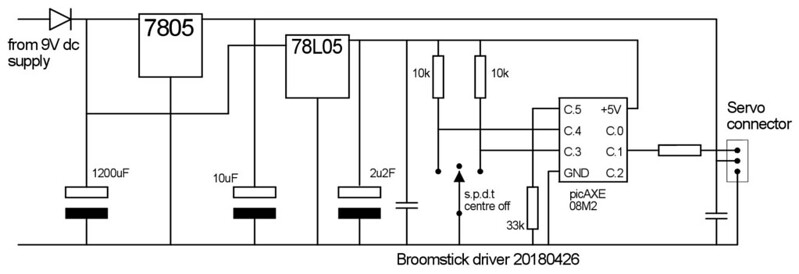
And here is the circuit diagram:
 Broomstick driver by H Norwood, on Flickr
Broomstick driver by H Norwood, on Flickr
I may have over-engineered the power supply, but the PicAXE manuals suggest the servo should have its own supply; I might have got away with a simpler RC decoupling on the 5v line...
Anyway, here is a photo taken from one end of the layout showing the witch in the air and the servo mechanism. The bead in the cord below the actuator arm prevents the cord dropping too low and allowing the brass wire that supports the broomstick from disengaging with the cup that holds it.
 Broomstick driver by H Norwood, on Flickr
Broomstick driver by H Norwood, on Flickr
The witch on her on her broomstick going up and down is always a crowd-pleaser. However up to date, it relies on the operator having a free hand to either gently pull the cord at the rear of the layout (to make the stick go up) or let it go - again gently - down.
So; could I motorise the effect? I considered using a motor and gearbox to wind the cord in and out, but then someone suggested I could use a servo motor as they were quiet cheap these days. My investigations revealed that I could get a miniature servo for around £6 and also that my preferred microcontroller, the PicAXE can drive a servo using just a resistor. Great!
I bought a servo and breadboarded a suitable circuit to familiarise myself with using the servo. After an initial set-back using the in-built servo commands, I received a work-round solution from the PicAXE user forum and made up a working system.
The witch moves through 60 mm, so I made an actuator arm out of 3mm plywood long enough to encompass that distance when rotated by the servo through about 90 degrees (actually more like 95 degrees) The arm is fixed to one of the plastic actuators that came with the servo.
The PicAXE is programmed to move the arm from one end to the other at pseudo random intervals of up to 65 seconds. There is a s.p.d.t. switch that can be used to force the system to go to one or other of the positions and stay there.
Here's a sketch showing the working details.
Broomstick driver by H Norwood, on FlickrThe witch and broomstick are mounted on the end of a length of 0.45mm brass wire, which passes through a collar in the baseboard. The lower end of the wire sits in a short length of "cotton bud" tube which itself is tied onto the end of a length of cord. A counterweight made of a couple of "penny" washers adds enough weight to ensure the witch descends nice and smoothly.
The cord passes over a couple of rollers and is passed through the baseboard and is hooked over the end of the servo arm. In transit, the witch and wire are stored in one stock box, whilst the cord is unhooked from the servo arm, pulled tight at the rear and held fast.
And here is the circuit diagram:
Broomstick driver by H Norwood, on FlickrI may have over-engineered the power supply, but the PicAXE manuals suggest the servo should have its own supply; I might have got away with a simpler RC decoupling on the 5v line...
Anyway, here is a photo taken from one end of the layout showing the witch in the air and the servo mechanism. The bead in the cord below the actuator arm prevents the cord dropping too low and allowing the brass wire that supports the broomstick from disengaging with the cup that holds it.
Broomstick driver by H Norwood, on Flickr