Bonjour à tous,
Me voici dans le gros du projet. La fabrication d'un VHL radio-commandé , piloté en FPV ( avec camera embarqué et retransmission en direct de la vidéo pour la conduite).
Ce post à pour but de réfléchir sur l'architecture à adopter pour le faire fonctionner au mieux .Car il reste différent du proto tout de même.
J'ai déjà réfléchis à la question , mais plein de question reste en suspend, car je n'ai pas les connaissances nécessaire pour y répondre en avance de phase .Si vous le désirez je vous propose de m'aider à réfléchir la dessus . Sur la faisabilité ou non de certains truc, sur des idées nouvelles, d'un point de vue exterieur .
Je précise que rien n'est figé, je dois toujours gardé en tête une mini marge de manœuvre ( par exemple laissé des broches libres pour d'autres périphériques ou options qu'on me demanderai de rajoutés, ou un changement d'équipements avec d'autres options , camera par exemple zoom pas zoom etc ....). Le cahier des charges n'est donc pas figés, et ne pourra jamais l'être.
Beaucoup de paramètres sont à prendre en compte, et je vais essayer de les expliquer au mieux ; mais comme je pourrais jamais penser a tout , car je manque d'expérience , n'hésitez pas a posez vos questions .
Par ou commencer : les fonctions du VHL ?
- être piloter par RC
- activer ou non sa vidéo à distance par réfléchir
- activer ou non deux périphériques embarqués à distance par TOR
- passer les vitesses par TOR mais avec mouvement de servo (et extérieur d'arrêt pour ne pas endommager les pignons)
- Passer les différentiels avant et arrière par TOR mais avec mouvement de servo ( même protocole d'arrêt que les vitesses)
- tourné les roues avant ( un servo par roue , deux servos en phase sur le même axe)
- Avoir un protocole spécial en cas de perte de communication
- Avoir un protocole en qu'a de longues pertes de communication, pour la retrouvée ( test a faire avec le proto et en cours de réflexion)
- faire bouger une camera en pan et tilt .
Voila j'espère ne rien avoir oublié .
Concernant les priorités :
La plus grande des priorités , c'est la communication avec celui ci .En effet il en va de sa sécurité, il pourrait tombé, foncé sur un obstacle etc ..... mais ca ne concerne pas les picaxe, je pense . La deuxième , c'est la réactivité du VHL pendant la conduite . la ca concerne les picaxes, il est préférable d'actualisé aussi souvent que possible les ordres de pilotage, quitte à perdre de la réactivité pour les TOR . Je préfère que le VHL s'arrête instantanément , plutôt qu'il active sa vidéo . En termes de priorité les TOR doivent passer en second plan .
Concernant la sécurité :
Comme dit plus haut , le pilotage reste prioritaire sur tout, il en va de son intégrité physique lol. Mais toutefois sur le plan de la sécurité et non de la priorité, il conviendrait d'effectuer un arrêt d'urgence en cas de perte de com ou dans certains cas pour ne pas l'endommager . Notamment pour le passage de vitesse et la mise en place des deux différentiels ( avant et arrière).
Fonctions particulières:
-Un protocole de recherche de communication est prévu à l'essai . à l'heure actuelle, la seule façon viable à mon sens, serait le retour du VHL sur une certaine durée dans le sens inverse ; Ce qui implique l'enregistrement des mouvements en mémoire EEprom. et donc change l'architecture. ce protocole pourra être automatique ou manuel
- Le mouvement de la camera doit être fais a l'arrêt, par activation d'un TOR ( BP sur la télécommande), et utilisé le même joystick que la marche avant/arrière .
Et le reste :
L'allumage de la vidéo , des périphériques embarqués , des phares etc .... seront au dernier plan .
Voila j'espère ne rien avoir oublié .
Maintenant la base posée , lancement des débats .
Ce à quoi je pensais pour l'architecture .
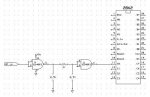
Un 14M2 dédié pour la réception radio et la distribution des ordres . En communication en i2C il serait donc maitre et pourras écrire ses données reçues par RF sur le 20X2 ou 28X2 .
Pourquoi dédié ? pour permettre la détection de la perte de communication .
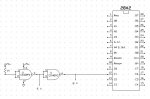
Un 20X2 ou 28X2 en esclave ( d'ou le X2) , pour la gestion des TORs, mais il devra également être capable d'écrire sur le SD20 pour donné les ordres aux servos, après traitement de l'information ( mise a l'échelle). Il devra pouvoir aussi écrire sur l'Eeprom les infos ( si cette option est retenue).
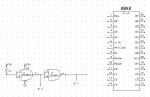
Le SD20 lui en esclave ne fait que recevoir des ordres de la part du 28X2 ou du 20x2 .
Et enfin la mémoire EEProm qui relié au 28X2 ou 20x2 serait écrite pour le stockage des différentes infos de moteur et direction seulement. ( le timing se fera au nombre d'ordre recus et non en temps)
Avec cette config Mon 14M2 réception ne fait que recevoir les infos par RF et les transmettre, donc meilleure réactivité ; Même si en réfléchissant autrement il peut recevoir des ordres que toutes les 38ms ( donnée fournis par l'émetteur lors de mes tests). donc on pourra envisagé de faire quelques trucs entre .
Le 20X2 ou 28X2 ferait le gros du travail ; mise a l'échelle des différentes valeurs analogiques reçues . envoyé sur le SD20 par i2c , écriture sur l'eeprom en i2C , et activation des sorties TOR . il doit faire tous ça en moins de 36ms, donc moulinage a fond certainement mais pas sur. Dans le but de ne jamais loupé une info venant du 14M2
Voila ceci est un premier jet qui mérite je n'en doute pas quelques améliorations .
Bien sur , il peut être envisagé d'autre façon de voir les choses, On peut aussi envisagé plusieurs picaxes dédiés genre un pour les TOR , un pour les ordres au SD20 ....
je ne suis presque pas contraint par la place sur lVHL contrairement à la télécommande, même si je souhaite mettre tout ça, dans une boite métallique pour le blindage !
Peut etre que mon projet est utopique, mais si vous voulez y participez se sera avec un grand plaisir que je débattrai avec vous sur ce sujet .
Celle que je trouve belle
« On commence par dire : cela est impossible pour se dispenser de le tenter, et cela devient impossible, en effet, parce qu'on ne le tente pas. » de Charles Fourier
« Il n'y a qu'une seule chose qui rend un rêve impossible à réaliser : La peur de l'échec. » Paulo Coelho
« L'impossible est ce qui ne peut pas être et qui pourtant est. » de Yvon Rivard
« Agissez comme s'il était impossible d'échouer. » de Winston Churchill
Me voici dans le gros du projet. La fabrication d'un VHL radio-commandé , piloté en FPV ( avec camera embarqué et retransmission en direct de la vidéo pour la conduite).
Ce post à pour but de réfléchir sur l'architecture à adopter pour le faire fonctionner au mieux .Car il reste différent du proto tout de même.
J'ai déjà réfléchis à la question , mais plein de question reste en suspend, car je n'ai pas les connaissances nécessaire pour y répondre en avance de phase .Si vous le désirez je vous propose de m'aider à réfléchir la dessus . Sur la faisabilité ou non de certains truc, sur des idées nouvelles, d'un point de vue exterieur .
Je précise que rien n'est figé, je dois toujours gardé en tête une mini marge de manœuvre ( par exemple laissé des broches libres pour d'autres périphériques ou options qu'on me demanderai de rajoutés, ou un changement d'équipements avec d'autres options , camera par exemple zoom pas zoom etc ....). Le cahier des charges n'est donc pas figés, et ne pourra jamais l'être.
Beaucoup de paramètres sont à prendre en compte, et je vais essayer de les expliquer au mieux ; mais comme je pourrais jamais penser a tout , car je manque d'expérience , n'hésitez pas a posez vos questions .
Par ou commencer : les fonctions du VHL ?
- être piloter par RC
- activer ou non sa vidéo à distance par réfléchir
- activer ou non deux périphériques embarqués à distance par TOR
- passer les vitesses par TOR mais avec mouvement de servo (et extérieur d'arrêt pour ne pas endommager les pignons)
- Passer les différentiels avant et arrière par TOR mais avec mouvement de servo ( même protocole d'arrêt que les vitesses)
- tourné les roues avant ( un servo par roue , deux servos en phase sur le même axe)
- Avoir un protocole spécial en cas de perte de communication
- Avoir un protocole en qu'a de longues pertes de communication, pour la retrouvée ( test a faire avec le proto et en cours de réflexion)
- faire bouger une camera en pan et tilt .
Voila j'espère ne rien avoir oublié .
Concernant les priorités :
La plus grande des priorités , c'est la communication avec celui ci .En effet il en va de sa sécurité, il pourrait tombé, foncé sur un obstacle etc ..... mais ca ne concerne pas les picaxe, je pense . La deuxième , c'est la réactivité du VHL pendant la conduite . la ca concerne les picaxes, il est préférable d'actualisé aussi souvent que possible les ordres de pilotage, quitte à perdre de la réactivité pour les TOR . Je préfère que le VHL s'arrête instantanément , plutôt qu'il active sa vidéo . En termes de priorité les TOR doivent passer en second plan .
Concernant la sécurité :
Comme dit plus haut , le pilotage reste prioritaire sur tout, il en va de son intégrité physique lol. Mais toutefois sur le plan de la sécurité et non de la priorité, il conviendrait d'effectuer un arrêt d'urgence en cas de perte de com ou dans certains cas pour ne pas l'endommager . Notamment pour le passage de vitesse et la mise en place des deux différentiels ( avant et arrière).
Fonctions particulières:
-Un protocole de recherche de communication est prévu à l'essai . à l'heure actuelle, la seule façon viable à mon sens, serait le retour du VHL sur une certaine durée dans le sens inverse ; Ce qui implique l'enregistrement des mouvements en mémoire EEprom. et donc change l'architecture. ce protocole pourra être automatique ou manuel
- Le mouvement de la camera doit être fais a l'arrêt, par activation d'un TOR ( BP sur la télécommande), et utilisé le même joystick que la marche avant/arrière .
Et le reste :
L'allumage de la vidéo , des périphériques embarqués , des phares etc .... seront au dernier plan .
Voila j'espère ne rien avoir oublié .
Maintenant la base posée , lancement des débats .
Ce à quoi je pensais pour l'architecture .
Un 14M2 dédié pour la réception radio et la distribution des ordres . En communication en i2C il serait donc maitre et pourras écrire ses données reçues par RF sur le 20X2 ou 28X2 .
Pourquoi dédié ? pour permettre la détection de la perte de communication .
Un 20X2 ou 28X2 en esclave ( d'ou le X2) , pour la gestion des TORs, mais il devra également être capable d'écrire sur le SD20 pour donné les ordres aux servos, après traitement de l'information ( mise a l'échelle). Il devra pouvoir aussi écrire sur l'Eeprom les infos ( si cette option est retenue).
Le SD20 lui en esclave ne fait que recevoir des ordres de la part du 28X2 ou du 20x2 .
Et enfin la mémoire EEProm qui relié au 28X2 ou 20x2 serait écrite pour le stockage des différentes infos de moteur et direction seulement. ( le timing se fera au nombre d'ordre recus et non en temps)
Avec cette config Mon 14M2 réception ne fait que recevoir les infos par RF et les transmettre, donc meilleure réactivité ; Même si en réfléchissant autrement il peut recevoir des ordres que toutes les 38ms ( donnée fournis par l'émetteur lors de mes tests). donc on pourra envisagé de faire quelques trucs entre .
Le 20X2 ou 28X2 ferait le gros du travail ; mise a l'échelle des différentes valeurs analogiques reçues . envoyé sur le SD20 par i2c , écriture sur l'eeprom en i2C , et activation des sorties TOR . il doit faire tous ça en moins de 36ms, donc moulinage a fond certainement mais pas sur. Dans le but de ne jamais loupé une info venant du 14M2
Voila ceci est un premier jet qui mérite je n'en doute pas quelques améliorations .
Bien sur , il peut être envisagé d'autre façon de voir les choses, On peut aussi envisagé plusieurs picaxes dédiés genre un pour les TOR , un pour les ordres au SD20 ....
je ne suis presque pas contraint par la place sur lVHL contrairement à la télécommande, même si je souhaite mettre tout ça, dans une boite métallique pour le blindage !
Peut etre que mon projet est utopique, mais si vous voulez y participez se sera avec un grand plaisir que je débattrai avec vous sur ce sujet .
Celle que je trouve belle
« On commence par dire : cela est impossible pour se dispenser de le tenter, et cela devient impossible, en effet, parce qu'on ne le tente pas. » de Charles Fourier
« Il n'y a qu'une seule chose qui rend un rêve impossible à réaliser : La peur de l'échec. » Paulo Coelho
« L'impossible est ce qui ne peut pas être et qui pourtant est. » de Yvon Rivard
« Agissez comme s'il était impossible d'échouer. » de Winston Churchill