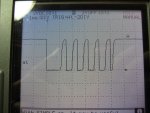
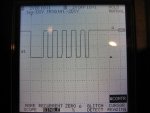
From the PICAXE screen shot it appears this is more than simple 'send a byte' stuff, or there's some misunderstanding of PICAXE baud rate polarity. The polarity should be chosen to match what is being driven, in this case it seems to be an opto and it wants an active high idle. What you appear to have from looking at the trace is a PICAXE sending using Nxxxx with some HIGH and LOW kludged in to get the idle high. You shouldn't need to do that, a Txxxx baud rate will do all that for you. It will require a single HIGH at reset, a HIGH before sending is not required, but adding it shouldn't do any harm as it simply sets the level high as it would already be using Txxxx.
On the receive side, it's a case of circuit analysis or observation to determine if the serial is idle low or idle high, use Nxxxxfor idle low, Txxxx for idle high.
It would clarify things if you could post your transmit and receive circuits along with their respective codes.
Best serial comms practice is to configure the line then leave the line alone, apart from using SEROUT to transmit data. For an opto between output pin and +V you ideally want to transmit with Txxxx, between pin and 0V you ideally want Nxxxx; this will minimise the amount of time the opto LED is on and reduce current.
I suspect that some nuance of PICAXE timing allowed what you had with two PICAXE to work, you have just been lucky with the data values you have been sending, or you haven't observed any consequences from incorrect data being received.
My approach would be to go back to two PICAXE with simple test programs, and adjust baud rate Nxxxx/Txxxx to match the hardware on transmit and on receiver to make it work.
' Transmitter
Symbol TX_PIN = ?
Symbol TX_BAUD = T2400
b1 = TX_BAUD : If b1 < 4 Then : High TX_PIN : End If
Do
Pause 500
SerOut TX_PIN, TX_BAUD, (b0)
b0 = b0 + 1
Loop
' Receiver
Symbol RX_PIN = ?
Symbol RX_BAUD = N2400
SerIn RX_PIN, RX_BAUD, b0
Do
b1 = b0 + 1
SerIn RX_PIN, RX_BAUD, b0
SerTxd( #b0," ")
If b1 <> b0 Then : SerTxd( "FAILED " ) : End If
Loop
Get that working, add SETFREQ M8 to each, test again, then replicate the transmitter code in the non-PICAXE.
Serial timing has to be within +/-6% overall.


")