I am trying to use a 18X as brain in a little solar rover
basically it do 2 thinks:
1) when capacitor voltage is below the threshold it remain still and minimize power compsumation
2) whan voltage reach the threshold it become active
can you give me some tips to optimize point 1?
i am talking about to lower current drain when picaxe is waiting for cap-charge
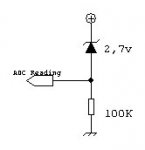
charge sensing is a simple zener(2.7v) + resistor(100K) and it works fine
now the polling loop is this:
b1=readadc Vsens
if b1>threshold then
do the job
else
nap 3
end if
________
Marijuana Pictures
basically it do 2 thinks:
1) when capacitor voltage is below the threshold it remain still and minimize power compsumation
2) whan voltage reach the threshold it become active
can you give me some tips to optimize point 1?
i am talking about to lower current drain when picaxe is waiting for cap-charge
charge sensing is a simple zener(2.7v) + resistor(100K) and it works fine
now the polling loop is this:
b1=readadc Vsens
if b1>threshold then
do the job
else
nap 3
end if
________
Marijuana Pictures
Last edited:

")