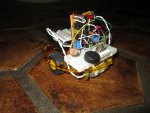
Here's my take on a simple microcontroller driven autonomous robot. The PICAXE and L293D motor controller are mounted on veroboard (stripboard) with screw terminals for the motor hookups. But because I always think that I might want to add just 1 more feature, I mounted the I/O devices (LDRs, LEDs, and piezo) on solderless breadboard.
The motors are driven by a simple photophile (or photovore) algorithm. It's pretty neat how 2 simple LDRs can provide some semblance of object avoidance. It's also fun to drive it around using a flashlight. It stops randomly to play any of about 20 different tunes, then continues on its way.
Information, code, schematic, and a video are at: http://corticalcafe.com/picaxe_robotoy_three.html

Video: http://www.youtube.com/watch?v=94cZgSOciOI
The motors are driven by a simple photophile (or photovore) algorithm. It's pretty neat how 2 simple LDRs can provide some semblance of object avoidance. It's also fun to drive it around using a flashlight. It stops randomly to play any of about 20 different tunes, then continues on its way.
Information, code, schematic, and a video are at: http://corticalcafe.com/picaxe_robotoy_three.html
Video: http://www.youtube.com/watch?v=94cZgSOciOI
Last edited: