calvinsykes
Member
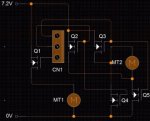
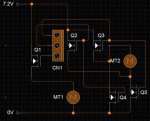
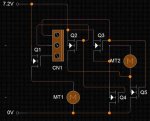
A first draft for a radio control, see what you think ")
Transmitter:
Receiver:
EDIT: Knew I had the commented version lying around somewhere.
This is for a hovercraft where I have a servo for steering and three FETs for control of the thrust and lift motors. At present using a load of switches at TX end but investigating something like this:
http://www.sparkfun.com/products/9032
Transmitter:
Code:
init: 'set up symbols so i can remember what means what
symbol servo_pending = b1 'variables i'll use later, just giving them nicer names
symbol thrust_pending = b2 'they keep track of what commands I need to send
symbol lift_last_sent = b3 '
symbol lift_pending = b4 '
symbol lift_wait_time = b5 ' timer to debounce lift toggle (more about that further on)
symbol servo_left_pin = pin4 'pins for various switches
symbol servo_right_pin = pin3'
symbol thrust_fwd_pin = pin2'
symbol thrust_bkwd_pin = pin1'
symbol lift_pin = pin0'
symbol txled_pin = 4 'pin number for flashy light
symbol rftx_pin = 5 'pin number for outgoing serial data to rf transmitter
symbol baudrate = T2400_4 'the speed of the serial connection, in bits per second
startup: high txled_pin 'just flash light to say "I've turned on!"
pause 1000
low txled_pin
let lift_last_sent = "N"
checkpins: 'now we see if any buttons are being pressed
if servo_left_pin = 1 then
let servo_pending = "L" 'need to transmit "turn right"
elseif servo_right_pin = 1 then
let servo_pending = "R" 'need to transmit "turn left"
else
let servo_pending = "M" 'don't want to turn so transmit "go to middle"
endif
if thrust_fwd_pin = 1 then
let thrust_pending = "F" 'need to transmit "go forwards"
elseif thrust_bkwd_pin = 1 then
let thrust_pending = "R" 'need to transmit "go backwards"
else
let thrust_pending = "O" 'don't want to move so transmit "turn off the thrust fan completely"
endif
'lift is a bit trickier; don't want to have to hold down the "hover" button all the time so we do this:
if lift_pin = 1 and lift_last_sent = "I" and lift_wait_time > 20 then 'toggle pressed, fan is on atm
let lift_pending = "O" 'so we want to transmit "turn it off"
let lift_wait_time = 0
elseif lift_pin = 1 and lift_last_sent = "O" and lift_wait_time > 20 then 'toggle pressed, fan is off atm
let lift_pending = "I" 'so we want to transmit "turn on"
let lift_wait_time = 0
elseif lift_pin = 1 and lift_last_sent = "N" and lift_wait_time > 20 then 'toggle pressed, but its the first time it has been
let lift_pending = "I" 'so we want to transmit "turn it on"
let lift_wait_time = 0
elseif lift_pin = 0 then 'toggle isn't on, so we want to transmit "stay in same state you are atm"
let lift_pending = lift_last_sent
endif
let lift_wait_time = lift_wait_time + 1 'put in a counter so that if you hold down button, lift doesnt keep toggling on and off 10,000 times a second :O
transmit: 'now we send the requests
high txled_pin 'flash light to show we are doing something
serout 5, baudrate, (0x55, 0x55, 0x55, 0x55, 0x55, 0x55, 0x55, 0x55) 'preamble of 01010101s to tune reciever
pause 15
serout 5, baudrate, ("data", servo_pending, thrust_pending, lift_pending) 'send the commands
low txled_pin 'light off
let lift_last_sent = lift_pending 'update lift state memory
goto checkpins 'start again
Code:
init: 'more symbols
symbol servo_state_pending = b0 'variables again; how I'll determine what needs doing, quickly
symbol servo_state_current = b1'
symbol servo_needs_changing = b2'
symbol thrust_state_pending = b3'
symbol thrust_state_current = b4'
symbol thrust_needs_changing = b5'
symbol lift_state_pending = b6'
symbol lift_state_current = b7'
symbol lift_needs_changing = b8'
symbol servo_pin = 4 'pin number for servo
symbol servo_middle_pos = 150 'rotation amounts for three servo positions
symbol servo_left_pos = 160'
symbol servo_right_pos = 140'
symbol rfrx_pin = 0 'pin number for incoming serial data from rf receiver
symbol baudrate = T2400_4 'rf link/serial data rate
symbol fwd_pin = 0 'pin numbers for power transistors to switch motors on and off
symbol bkwd_pin = 1'
symbol lift_pin = 2'
symbol rxled_pin = 3 'pin number for flashy light
startup: 'set some stuff up
servo_state_current = "M" 'servo should be in middle...
thrust_state_current = "O" '...thrust should be off...
lift_state_current = "O" '...and so should lift
high rxled_pin '"I've turned on!" again
pause 1000
low rxled_pin
servo servo_pin, servo_middle_pos 'actually move servo incase someone has fiddled while it was off
pause 75
listen: 'wait for transmission from other curcuit
serin rfrx_pin, baudrate, ("data"), servo_state_pending,thrust_state_pending, lift_state_pending 'read requests from transmitter into these variables
high rxled_pin 'show something is happening
goto receive
receive: 'so what now?
if servo_state_pending != servo_state_current then 'requested servo position different from current
let servo_needs_changing = 1 'so we'll need to do something about it
gosub srvo 'go and do it
endif
if thrust_state_pending != thrust_state_current then 'requested thrust different form current
let thrust_needs_changing = 1 'so we'll need to do something about it
gosub thrust 'go and do it
endif
if lift_state_pending != lift_state_current then 'requested liftdifferent from current
let lift_needs_changing = 1 'so we'll need to do something about it
gosub lift 'go and do it
endif
low rxled_pin 'receive done so turn light off...
goto listen 'and do it again
srvo: 'move servo around
if servo_state_pending = "L" then 'want to move to left
servo servo_pin, servo_left_pos
pause 100 'give servo a chance to move
elseif servo_state_pending = "R" then
servo servo_pin, servo_right_pos 'want to move to right
pause 100 'give servo a chance to move
elseif servo_state_pending = "M" then 'want to move to middle
servo servo_pin, servo_middle_pos
pause 100 'give servo a chance to move
endif
let servo_state_current = servo_state_pending 'update servo state memory
return 'go back to where we came from
thrust: 'alter thrust fan configuration
if thrust_state_pending = "F" then 'want to go forwards
low bkwd_pin
high fwd_pin
elseif thrust_state_pending = "R" then 'want to go backwards
low fwd_pin
high bkwd_pin
elseif thrust_state_pending = "O" then 'All stop, Cap'n
low fwd_pin
low bkwd_pin
endif
let thrust_state_current = thrust_state_pending 'update thrust state memory
return 'go back to where we came from
lift: 'alter lift fan configuration
if lift_state_pending = "I" then 'want to turn it on
high lift_pin
elseif lift_state_pending = "O" then 'want to turn it off
low lift_pin
endif
let lift_state_current = lift_state_pending 'update lift state memory
return 'go back to where we came fromThis is for a hovercraft where I have a servo for steering and three FETs for control of the thrust and lift motors. At present using a load of switches at TX end but investigating something like this:
http://www.sparkfun.com/products/9032
Last edited: