Bonjour
je suis un novice , et je me suis lance ans la fabrication d un boitier de jalonnage
sur abcelectronique j ai ouvert 2 discusions :
l une sur mon syteme de jalonnage au depart base sur un CD4017 : http://www.abcelectronique.com/forum/showthread.php?t=69154
puis une personne m a expliquer le potentiel des picaxes du coup j ai revu ma position pour artir sur la fabrication de ce boitier avec un LCD : http://www.abcelectronique.com/forum/showthread.php?p=657463#post657463
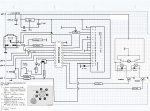
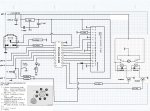
je remets ici donc mon schema qui a encore quelques erreur de hardware
la prise ISO 11786 equipant mon tracteur me permet de recuperer des info sans montage necessaire de capteurs
Le capteur ILS dont je faisait allusion ici : http://www.abcelectronique.com/foru...54&page=1&pp=10
est remplace par l info de la position du relevage arriere du tracteur car celui relevant le combine de semis me permets de recupere rla meme info au meme moment
sur l ecran a 2 ligne j ai l intention de faire afficher les info suivantes
" JALONNAGE "X" /4"
" surface"XX,X"ha"
le but etant d afficher une info sur la position du jalonnage et une info sur la surface semée
Pour la surface , l info sera prise sur les 130 ( ou 100 d aulleur suivant la norme)impulsiosn par metre , et pour un outil de 3 m de large , sera compter uniquement lors que le outil sera par terre ( position relevage a 0 volts )
explication entre vitesse theorique et reelle : un tracteur dans un champs suivant l effort de traction patine cela pouvant alle a 30 % parfois , si comme une voiture la vitesse etait prise sur les roues ( vitesse theorique parcelles de 10 ha se transformere en 13 ha ( au fait 1 ha = 10 000m² ), l interet de remonte ces information c est pour les boitiers qui dose une quantite d engrais par exemple cela evite les surdossages, dons en option les on peux avoir une option de RADAR, donnant une lecture de la vitesse par mesure via desondes au sols , mais cela a une limite pour etre precis : 15km/h
normalement vu vos explication lorsque le picaxe comptera la surface , il ne sera pas en train de compter des impulsions de passage par contre lorsque le comptage de surface sera interompu par la leve des bras il ne contera plus de surface mais la il comptera une impulsion de plus pour le jalonnage si il est en position je lui demande d alimenter pendant 2 secondes une sortie , si il est en position meme temps mais une autre sortie
Tout le temps que durera la position 2 et la position 3 j aimerai que la diode este alumer , cependant est il possible de la faire clignoter du temps du pilotage du moteur ( les 2 secondes ) ?
d autre evolutions ? pourquoi mais lad ans l instant je n en ai pas d autre en tete qu une alimentation pernanente surune patte pour alimenter une electrovanne de jalonnage de preleve , mais a l heure par besoin car semoir pas equipe, et je cherhce toujours une capteur capacitf , cependant je vais recevoir des capteurs inductif capable de voir si une bouteille d eau est plaien deau ou vide donc capable de detecter autre chose que de metalique
cependant je viens de faire mon programme
j aimerai votre avis
je me pose quelques problemes:
consernant l affichage de la surface je l aimerai sous le format 2 chiffres avant la virgule et 2 apres , par ex 10.23 ha
ma bloque de conpatge de surface tourne sans termpo pour pourvoir compter chaque impulsions ( qui represente 1/130 de m ), je vais avoir pour une vitesse de 10 km/h environ 400 Hz, pensez que ma bloque pourra suivre ?
bizarrement en mode test , mon affichage LCD marche bien tant que l entree 4 n est pas modifie ( blocage de comptage) : affichage sur 2 lignes , la premiere laposition de jalonnage la seconde la surface , des que je je change C4, la l affichage du LCD se fait uniquement sur la seconde logne , est ce un bug de picaxe editor ou un bug de mon programme ?
une autre chose , j avais cru comprendre que par exemple C3 pouvait servir d entre comme de sortie , mais dans l etat actuelle de mes connaissances je n arriverai que a en faire une entre or j aimerai en faire une sortie
par avance merci
je suis un novice , et je me suis lance ans la fabrication d un boitier de jalonnage
sur abcelectronique j ai ouvert 2 discusions :
l une sur mon syteme de jalonnage au depart base sur un CD4017 : http://www.abcelectronique.com/forum/showthread.php?t=69154
puis une personne m a expliquer le potentiel des picaxes du coup j ai revu ma position pour artir sur la fabrication de ce boitier avec un LCD : http://www.abcelectronique.com/forum/showthread.php?p=657463#post657463
je remets ici donc mon schema qui a encore quelques erreur de hardware
la prise ISO 11786 equipant mon tracteur me permet de recuperer des info sans montage necessaire de capteurs
Le capteur ILS dont je faisait allusion ici : http://www.abcelectronique.com/foru...54&page=1&pp=10
est remplace par l info de la position du relevage arriere du tracteur car celui relevant le combine de semis me permets de recupere rla meme info au meme moment
sur l ecran a 2 ligne j ai l intention de faire afficher les info suivantes
" JALONNAGE "X" /4"
" surface"XX,X"ha"
le but etant d afficher une info sur la position du jalonnage et une info sur la surface semée
Pour la surface , l info sera prise sur les 130 ( ou 100 d aulleur suivant la norme)impulsiosn par metre , et pour un outil de 3 m de large , sera compter uniquement lors que le outil sera par terre ( position relevage a 0 volts )
explication entre vitesse theorique et reelle : un tracteur dans un champs suivant l effort de traction patine cela pouvant alle a 30 % parfois , si comme une voiture la vitesse etait prise sur les roues ( vitesse theorique parcelles de 10 ha se transformere en 13 ha ( au fait 1 ha = 10 000m² ), l interet de remonte ces information c est pour les boitiers qui dose une quantite d engrais par exemple cela evite les surdossages, dons en option les on peux avoir une option de RADAR, donnant une lecture de la vitesse par mesure via desondes au sols , mais cela a une limite pour etre precis : 15km/h
normalement vu vos explication lorsque le picaxe comptera la surface , il ne sera pas en train de compter des impulsions de passage par contre lorsque le comptage de surface sera interompu par la leve des bras il ne contera plus de surface mais la il comptera une impulsion de plus pour le jalonnage si il est en position je lui demande d alimenter pendant 2 secondes une sortie , si il est en position meme temps mais une autre sortie
Tout le temps que durera la position 2 et la position 3 j aimerai que la diode este alumer , cependant est il possible de la faire clignoter du temps du pilotage du moteur ( les 2 secondes ) ?
d autre evolutions ? pourquoi mais lad ans l instant je n en ai pas d autre en tete qu une alimentation pernanente surune patte pour alimenter une electrovanne de jalonnage de preleve , mais a l heure par besoin car semoir pas equipe, et je cherhce toujours une capteur capacitf , cependant je vais recevoir des capteurs inductif capable de voir si une bouteille d eau est plaien deau ou vide donc capable de detecter autre chose que de metalique
cependant je viens de faire mon programme
j aimerai votre avis
je me pose quelques problemes:
consernant l affichage de la surface je l aimerai sous le format 2 chiffres avant la virgule et 2 apres , par ex 10.23 ha
ma bloque de conpatge de surface tourne sans termpo pour pourvoir compter chaque impulsions ( qui represente 1/130 de m ), je vais avoir pour une vitesse de 10 km/h environ 400 Hz, pensez que ma bloque pourra suivre ?
bizarrement en mode test , mon affichage LCD marche bien tant que l entree 4 n est pas modifie ( blocage de comptage) : affichage sur 2 lignes , la premiere laposition de jalonnage la seconde la surface , des que je je change C4, la l affichage du LCD se fait uniquement sur la seconde logne , est ce un bug de picaxe editor ou un bug de mon programme ?
une autre chose , j avais cru comprendre que par exemple C3 pouvait servir d entre comme de sortie , mais dans l etat actuelle de mes connaissances je n arriverai que a en faire une entre or j aimerai en faire une sortie
par avance merci
Attachments
-
 299.3 KB Views: 53
299.3 KB Views: 53 -
7.1 KB Views: 24