prajesh828
New Member
Here is my program. I want to see if my ir sensors are working or not.
i have attached my files what m using.
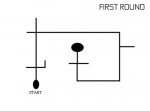
Used 28x2 on picaxe. Now Should i use readadc A.0 or irin? It should clear the maze of line. Line is black line while rest is white. So confused.
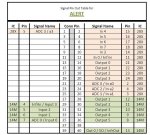
A.0 and A.3 are my sensor pins.
Code:
#rem
***********************************************************************
*
* DESCRIPTION *
************************************************************************ *
* This program Tests the robot whiskers and moves to the appropriate navigation subrouotine.
* RIGHT FORWARD IS PIN , BACKWARD PIN
* LEFT FORWARD IS PIN , BACKWARD PIN
* RIGHT SPEED PWM
* LEFT SPEED PWM
#endrem
symbol swR = C.4 'Define input pin Left whisker
symbol swL = C.6 'Define input pin Right whisker
#rem
***********************************************************************
*
* Define output pin usage
***********************************************************************
#endrem
symbol PIEZO = B.1 ' AUDIO OUTPUT TO PIEZO SPEAKER
symbol ledr = B.0 ' Left LED
symbol ledl = B.2 ' Right LED
#rem
***********************************************************************
*
* Define variables *
**********************************************************************
#endrem
' symbol time = b7
' symbol whiskers = b8
#rem
***********************************************************************
*
* Program Initialisation
************************************************************************
The program starts execution here when the processor is powered up, is
reset, and after the program has been downloaded.
The output pins are immediately cleared to stop the motors, and then the
program issues two low frequency beeps on thepiezo transducer to indicate
it has initialised, and then waits 5S to allow the other processors to be
initialised ( and power to be applied to the motors if switched off ).
#endrem
tune B.1, 6,($40,$40,$45,$44,$45,$40,$02)
main:
forward a pwmout C.1, 99, 200
forward b pwmout C.2, 99, 198
irin A.3,b0
irin A.0,b1
debug
if b0>180 and b1>180 then go
if b0>180 and b1<180 then left
if b0<180 and b1>180 then right
if b0<180 and b1<180 then rukhja
goto main
go:
high ledl
forward a
forward b
high ledr
goto main
left:
high ledr
forward a
backward b
low ledl
goto main
right:
high ledl
forward b
backward a
low ledr
goto main
rukhja:
low ledl
halt a
halt b
low ledr
goto maini have attached my files what m using.
Used 28x2 on picaxe. Now Should i use readadc A.0 or irin? It should clear the maze of line. Line is black line while rest is white. So confused.
A.0 and A.3 are my sensor pins.
Attachments
-
27.1 KB Views: 30
 . Ya it is the alertbot 2.1 i talked about.Sorrry for the confusion.
. Ya it is the alertbot 2.1 i talked about.Sorrry for the confusion.