exartemarte
New Member
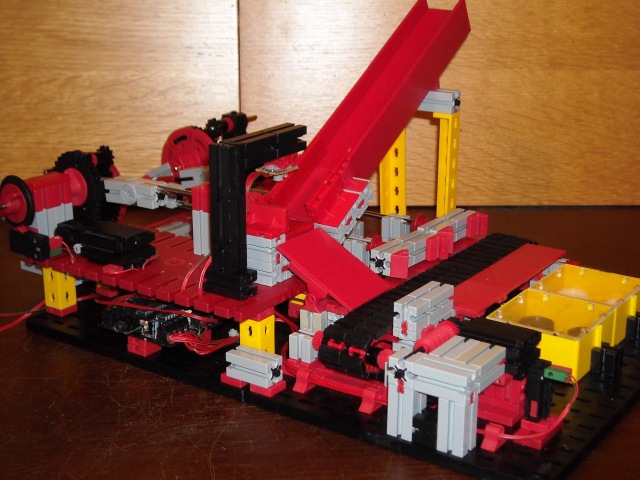
A draughts sorter (there's useful!) constructed from fischertechnic parts, with a homebrew reflective IR sensor to detect and identify draughts, controlled by a Picaxe-18X on a Picaxe project board (lurking under the red platform at the left-hand side).
I've been buying fischertechnik bits on eBay, and I fancied building something with a conveyor belt.
There's a video of the thing in action here: http://www.youtube.com/watch?v=kxGT2cTRUIY
I've been buying fischertechnik bits on eBay, and I fancied building something with a conveyor belt.
There's a video of the thing in action here: http://www.youtube.com/watch?v=kxGT2cTRUIY
Code:
'Draughts Sorter
'DJW/exartemarte Jan 2010
'Constants
symbol min_red_level = 50 'Lower threshhold of IR light reflected from red platform
symbol max_red_level = 100 'Upper threshhold of IR light reflected from red platform
'(Reflected IR light is measured on platform at base of chute)
'(Below lower threshhold > black draught)
'(Above upper threshhold > white draught)
'(Within threshholds > no draught)
symbol black_delay = 10 'No of conveyor belt clicks before pushing black draught off belt
symbol white_delay = 22 'No of conveyor belt clicks before pushing white draught off belt
'Variables
symbol light_level = b0 'For ADC value (reflected light level) read from IR sensor
symbol conveyor_count = b1 'For counting conveyor belt clicks while draught is on belt
'I/O Assignments
symbol IR_sensor = 0 'Measures reflected IR to identify black/white/no draught
symbol belt_counter = input1 'Microswitch clicked continuously as belt motor rotates
symbol draught_push_sw = input2 'Limit switch for motor that pushes drafts onto belt
symbol black_push_sw = input6 'Limit switch for motor that pushes draughts off belt into black box
symbol white_push_sw = input7 'Limit switch for motor that pushes draughts off belt into white box
'Note: limit switches are off while pushing, on in rest position
symbol IR_led = 0 'Illuminates draught platform at base of chute
symbol belt_motor = 1 'Drives conveyor belt
symbol draught_push_motor = 2 'Pushes draughts from base of chute onto conveyor belt
symbol black_push_motor = 3 'Pushes draughts from conveyor belt into black draught box
symbol white_push_motor = 4 'Pushes draughts from conveyor belt into white draught box
init:
gosub initialise 'make sure push motors are zeroed and IR source is on
wait_for_draught:
switch off belt_motor 'stop the conveyor while there are no draughts
check_draught_colour:
readadc IR_sensor,light_level 'get IR level reflected from platform at base of chute
if light_level < min_red_level then black_draught 'if it's below red then it's a black draught
if light_level > max_red_level then white_draught 'if it's above red then it's a white draught
goto wait_for_draught 'if it's red then there's no draught
black_draught:
switch on belt_motor 'make sure the belt is moving
gosub push_draught_onto_belt 'push the draught onto the belt
conveyor_count = 0 'draught is now on belt
do 'so zero the count
gosub one_belt_count 'and count conveyor belt pulses
loop until conveyor_count >= black_delay 'until they get to the required number
gosub push_black_draught_off_belt 'then push draught off belt into box
goto check_draught_colour 'all done, so go to check the next draught.
white_draught:
switch on belt_motor 'make sure the belt is moving
gosub push_draught_onto_belt 'push the draught onto the belt
conveyor_count = 0 'draught is now on belt
do 'so zero the count
gosub one_belt_count 'and count conveyor belt pulses
loop until conveyor_count >= white_delay 'until they get to the required number
gosub push_white_draught_off_belt 'then push draught off belt into box
goto check_draught_colour 'all done, so go to check the next draught.
one_belt_count:
do
loop until belt_counter is on 'wait until belt pulse switch goes on
pause 10 'debounce
do
loop until belt_counter is off 'wait until belt pulse switch goes off again
pause 10 'debounce
conveyor_count = conveyor_count + 1 'then increment the count
return 'and exit.
push_draught_onto_belt:
switch on draught_push_motor 'start pushing the draught off the platform onto the belt
pause 200 'let the push motor get past the limit switch
do
loop until draught_push_sw is on 'wait until the switch goes on again (= push completed)
switch off draught_push_motor 'then switch off the motor
return 'and exit.
push_black_draught_off_belt:
switch on black_push_motor 'start the push motor
pause 400 'wait until the motor gets past the limit switch
do
loop until black_push_sw is on 'wait until the push cycle is completed
switch off black_push_motor 'then switch off the motor
return 'and exit.
push_white_draught_off_belt:
switch on white_push_motor 'start the push motor
pause 400 'wait until the motor gets past the limit switch
do
loop until white_push_sw is on 'wait until the push cycle is completed
switch off white_push_motor 'then switch off the motor
return 'and exit.
initialise:
'make sure push motors are zeroed and IR source is on
do while draught_push_sw is off
switch on draught_push_motor
loop
switch off draught_push_motor
do while black_push_sw is off
switch on black_push_motor
loop
switch off black_push_motor
do while white_push_sw is off
switch on white_push_motor
loop
switch off white_push_motor
switch on IR_led
return