Gramps
Senior Member
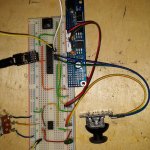
We are attempting to build this joystick servo controller from Ken Anderson's book, Picaxe Project Handbook V.1,Pt1.
How to switch it to 28X2 chip? I tried a number of pin configurations but to no avail.
#picaxe14M2
#no_data
symbol TEMP = b0
symbol servo1pos =w6
symbol servo2pos =w7
symbol VrX=c.0
symbol VrY=c.4
symbol SERV01=b.4
symbol SERV02=b.5
init:
servo SERV01,150
servo SERV02,150
PAUSE 1000
main:
servo1pos=0
servo2pos=0
readadc VrX,temp
servo1pos=150*temp/255+75
readadc VrY,temp
servo2pos=150*temp/255+75
servopos SERV01,servo1pos
servopos SERV02,servo2pos
goto main
end
How to switch it to 28X2 chip? I tried a number of pin configurations but to no avail.
#picaxe14M2
#no_data
symbol TEMP = b0
symbol servo1pos =w6
symbol servo2pos =w7
symbol VrX=c.0
symbol VrY=c.4
symbol SERV01=b.4
symbol SERV02=b.5
init:
servo SERV01,150
servo SERV02,150
PAUSE 1000
main:
servo1pos=0
servo2pos=0
readadc VrX,temp
servo1pos=150*temp/255+75
readadc VrY,temp
servo2pos=150*temp/255+75
servopos SERV01,servo1pos
servopos SERV02,servo2pos
goto main
end