Thank you for the info
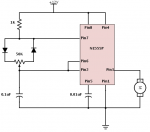
I will remove the zener. It was there for protection if pot goes to zero
I will try the voltage divider with a 2k2 in series with a 2k pot. That will ensure I never get more than 5V on the adc input if input voltage goes to 16V which will never happen
And then I can fine tune
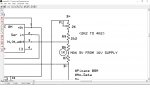
There was a dry joint on the board on the pic supply. I also replaced the igbt with a big fet. FDA032N08 . The heatsink runs cold while the motor gets hot. I wanted to use an 18V isolated supply chip and mosfet driver but that doesn't seems to be necessary. Driving the fet straight from 5V works good
I will remove the zener. It was there for protection if pot goes to zero
I will try the voltage divider with a 2k2 in series with a 2k pot. That will ensure I never get more than 5V on the adc input if input voltage goes to 16V which will never happen
And then I can fine tune
There was a dry joint on the board on the pic supply. I also replaced the igbt with a big fet. FDA032N08 . The heatsink runs cold while the motor gets hot. I wanted to use an 18V isolated supply chip and mosfet driver but that doesn't seems to be necessary. Driving the fet straight from 5V works good
Attachments
-
 130.1 KB Views: 16
130.1 KB Views: 16 -
 129.5 KB Views: 19
129.5 KB Views: 19 -
 57.1 KB Views: 18
57.1 KB Views: 18
Last edited: