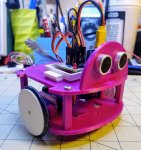
Hi Mr Scott, the stepper motors I used are ubiquitous
https://www.ebay.co.uk/itm/Driver-Board-Stepper-Motors-28BYJ-48-LED-Wear-resistant-Set-5V-4-Phase-Geared/124271754944?hash=item1cef2c7ec0:g:eek:QUAAOSw~INe665Z
There are ways to pulse the pins,they come with a driver board. I used full wave. I used an every 2ms interrupt to change the on/offs for the 4 ports needed and same for other motor...another 4 ports. I dedicated uno portd for motors.
I can't post picaxe code cos I used a different basic...that does unos and nanos..sorry.
If you want to see the code here it is. Yeah.not picaxe but I got the v53L0X simplified working from posts to erco and had to translate picaxe basic..
not fun. Keep in touch as we're of thousands that like making "robots"....but what to get them to do??
;fullwave stepper V53L0X robot
#chip mega328p,16
#option Explicit
dir portc.0 out ;servo
dir portd.0 out:dir portd.1 out:dir portd.2 out:dir portd.3 out ;left motor
dir portd.4 out:dir portd.5 out:dir portd.6 out:dir portd.7 out ;right motor
dir portc.3 out
;set up V53L0X
#define HI2C_DATA PORTC.5 ;sda portc.4 for nano portc.5 for uno
#define HI2C_CLOCK PORTC.4 ;scl portc.5 for nano portc.4 for uno
#define HI2C_BAUD_RATE 400
HI2CMode Master
;
;v53l0x software restart
HI2CStart
HI2CSend(0x52)
HI2CSend(0x89)
HI2CSend(0x01)
HI2CStop
wait 200 ms
;
dim l_mot_pos,r_mot_pos as byte
dim l_mot_dir,r_mot_dir as byte
dim servopos as Word
dim servodir,distance_lo,distance_hi,mindist,last_turn as Byte
;
;interrupt variables
dim motors_event,motors_event_timer as byte
dim servo_event,servo_event_timer as byte
motors_event_timer=0:servo_event_timer=0
motors_event=2 ;every 2ms
servo_event=20 ;every 20ms
;------------
;
#define distance distance_hi*256 + distance_lo ;v53l0x distance
#define forward 1 ;|
#define reverse 255 ;|--motor direction
#define stop 0 ;|
#define servopin portc.0
#define wasleft 1
#define wasright 0
;
last_turn = random and 1 ;0 or 1
servopos=1500 ;1.5ms servo mid position
servodir=1 ;servo rotation direction
mindist=200 ;minimum distance before avoiding
l_mot_pos=1:r_mot_pos=1
l_mot_dir=forward:r_mot_dir=forward
;-----------
;set up interrupts
On Interrupt Timer0Match1 Call isr
Dim OCR0 AS byte alias OCR0A
Dim TCCR0 AS byte alias TCCR0B
WGM01 = 1
OCR0 = 62 ;every 1ms. 124 for 2ms
TCCR0 = 0x28
TCCR0 = TCCR0 or 0x03 ;1ms. 0x04 2ms
;-----------
do ;main program
;check for objects and avoid
getdistance ;any object too close?
if distance <> 20 then ;20 means out of range so skip distance test
;
;distance to obstacle test
if servopos > 1300 then ;not pointing right
if servopos < 1700 then ;not pointing left
mindist = 200 ;pointing forward min distance
end if
else
mindist = 250 ; left and right min distance
end if
;
if distance < mindist then ;object close
l_mot_dir=stop:r_mot_dir=stop ;stop motors
;
if servopos > 1700 then
turnright_until_clear ;object left
last_turn = wasright
else if servopos < 1300 then
turnleft_until_clear ;object right
last_turn = wasleft
else ;obstacle forward
l_mot_dir=reverse : r_mot_dir=reverse : wait 500 ms ;reverse 500ms
if last_turn = wasright then ;turn right again
servodir=1
turnright_until_clear
else ;turn left again
servodir=0
turnleft_until_clear
end if
end if
l_mot_dir=forward:r_mot_dir=forward ;go forward
end if
end if
;
;rotate servo left-right
if servodir = 1 then
servopos = servopos +80
if servopos = 2220 then
servodir = 0
end if
else
servopos = servopos - 80
if servopos = 780 then
servodir = 1
end if
end if
; pulseout servopin,servopos us
wait 30 ms 'to allow servo to move slower and not overheat and getdistance to work
loop
;end of main
;-------------------
sub isr
motors_event_timer = motors_event_timer + 1
if motors_event_timer=motors_event then
motors : motors_event_timer=0 ;every 2ms
end if
servo_event_timer = servo_event_timer + 1
if servo_event_timer=servo_event then
servo : servo_event_timer=0 ;every 20ms
end if
end sub
;--------------------
sub getdistance
HI2CStart ;Sys V53L0X Range Start
HI2CSend(0x52)
HI2CSend(0x00)
HI2CSend(0x01)
HI2CStop
HI2CStart ;read distance
HI2CSend(0x52)
HI2CSend(0x1e)
HI2CReStart
HI2CSend(0x53) ;set the read flag
HI2CReceive(distance_hi)
HI2CReceive(distance_lo, NACK) ;read one byte and conclude
HI2CStop
end sub
;-------------------
sub turnleft_until_clear
do
l_mot_dir=reverse:r_mot_dir=forward ;rotate anti clockwise
wait 20 ms
l_mot_dir=stop:r_mot_dir=stop
getdistance
loop until distance > mindist ;rotate left until clear
end sub
;-------------------
sub turnright_until_clear
do
l_mot_dir=forward:r_mot_dir=reverse ;rotate clockwise
wait 20 ms
l_mot_dir=stop:r_mot_dir=stop
getdistance
loop until distance > mindist ;rotate right until clear
end sub
;-------------------
sub motors
;left motor
if l_mot_dir=stop then
set portd.0 off:set portd.1 off:set portd.2 off:set portd.3 off
else if l_mot_dir=forward then
l_mot_pos++
if l_mot_pos=5 then
l_mot_pos=1
end if
else
l_mot_pos---
if l_mot_pos=0 then
l_mot_pos=4
end if
end if
;
select case l_mot_pos
case 4
set portd.0 on:set portd.1 on:set portd.2 off:set portd.3 off
case 3
set portd.0 off:set portd.1 on:set portd.2 on:set portd.3 off
case 2
set portd.0 off:set portd.1 off:set portd.2 on:set portd.3 on
case 1
set portd.0 on:set portd.1 off:set portd.2 off:set portd.3 on
end select
;
;right motor
if r_mot_dir=stop then
set portd.4 off:set portd.5 off:set portd.6 off:set portd.7 off
else if r_mot_dir=forward then
r_mot_pos++
if r_mot_pos=5 then
r_mot_pos=1
end if
else
r_mot_pos---
if r_mot_pos=0 then
r_mot_pos=4
end if
end if
;
select case r_mot_pos
case 4
set portd.4 on:set portd.5 off:set portd.6 off:set portd.7 on
case 3
set portd.4 off:set portd.5 off:set portd.6 on:set portd.7 on
case 2
set portd.4 off:set portd.5 on:set portd.6 on:set portd.7 off
case 1
set portd.4 on:set portd.5 on:set portd.6 off:set portd.7 off
end select
end sub
;-------------------
sub servo
pulseout servopin,servopos us
end sub
 804.9 KB Views: 16
804.9 KB Views: 16 872.4 KB Views: 18
872.4 KB Views: 18 998.7 KB Views: 16
998.7 KB Views: 16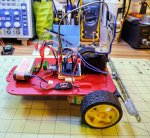 945.8 KB Views: 16
945.8 KB Views: 16 831 KB Views: 13
831 KB Views: 13")